22.R4.0
Release Date | 2022/12/16 16:00 PM (GMT +9) |
Simulator | MORAI SIM: Drive ST |
Version | 22.R4.0 |
Release
R _ 2022.12.16 _ 22.R4.0
Updates
Map Update
N/A
GameWheel Mode Game Wheel 로 제어하기
Key 정보 변경
뒷바퀴 브레이크와 주차 브레이크의 기능이 주차 브레이크 기능으로 통합되어, 십자 패드 상/하 버튼이 십자 패드 하(주차 브레이크 버튼)으로 일원화함.
조작 방식 변경
휠 컨트롤러의 좌/우 방향 지시등 및 비상등 버튼이 시뮬레이터 차량과 연동 가능함.
최신 양산 차량의 EPB Logic 반영하여 주차 브레이크 Logic 변경함.
Ego Vehicle
Driving State Init 기능 추가 차량 Driving State Init 모드
Ego Vehicle 제어 모드 변경 시 Ego Vehicle의 이전 상태를 유지할 지 여부를 결정함.
Sensor
Depth Camera(Ground Truth) 추가 센서 배치 및 설정 | Camera
Depth GT를 통해 이미지 각 픽셀의 깊이 값 확인할 수 있음.
MORAI SIM: API
사용자 및 MORAI SIM 제품군에 따라 다르게 사용하는 gRPC API의 공통 부분을 취합하여 MORAI API로 표준화
확장성을 고려하여 시뮬레이터에서 제공하는 서비스 카테고리에 gRPC API를 Proto 파일 단위로 분류 및 RPC(Function)와 Message(Structure) 타입으로 구조화
기존 MORAI SIM Control API, gRPC API, OpenSCENARIO API 페이지를 떼어내어 MORAI SIM: API Guide 문서로 통합함
NPC
주행 알고리즘 고도화
정지선 및 신호 구성이 복잡해짐에 따라 NPC 판단 로직을 고도화함.
Model Type
Kinematics Model
ACC
전방 차량과 속도/거리를 유지할 때 불안정하게 주행하는 이슈 개선
저속 구간 Chattering 이슈 개선
브레이크등
저속에서 감속 시 브레이크등 빈번하게 켜지는 현상 개선
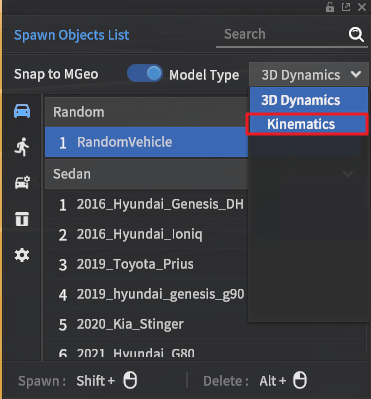
NPC Model Type 선택 화면
Advanced Vehicle Dynamics (Add-on)
Constant Radius Test 추가 ■ Constant Radius Test
Constant Radius Test를 통해 Ego Vehicle의 Oversteer 및 Understeer 특성을 파악할 수 있음.
Bug fixes
Map
R_KR_PR_Sangam_NoBuildings 맵
R_KR_PR_Sangam_NoBuildings 맵에서 ROS 통신 GetTrafficLightStatus 메세지 데이터 수신하지 못하는 이슈 개선.
r_kr_pg_c-track_outdoor 맵
r_kr_pg_c-track_outdoor 맵 내 차량 주행에 영향(충돌)을 주는 식생(식물) 제거.

MORAI SIM: API
gRPC API
EgoCtrlCmd 메세지 사용 에러 개선
Scenario
Built-in Scenario Edit
NPC 차량 Path 지정 후 Destination Mode ‘STOP’ 설정 시, 간헐적 비정상 동작 개선

Closed Loop 활성화 시, Path 계산 실패('Cannot calculate the shortest path')해도 Viz-Path가 노출되는 현상 개선
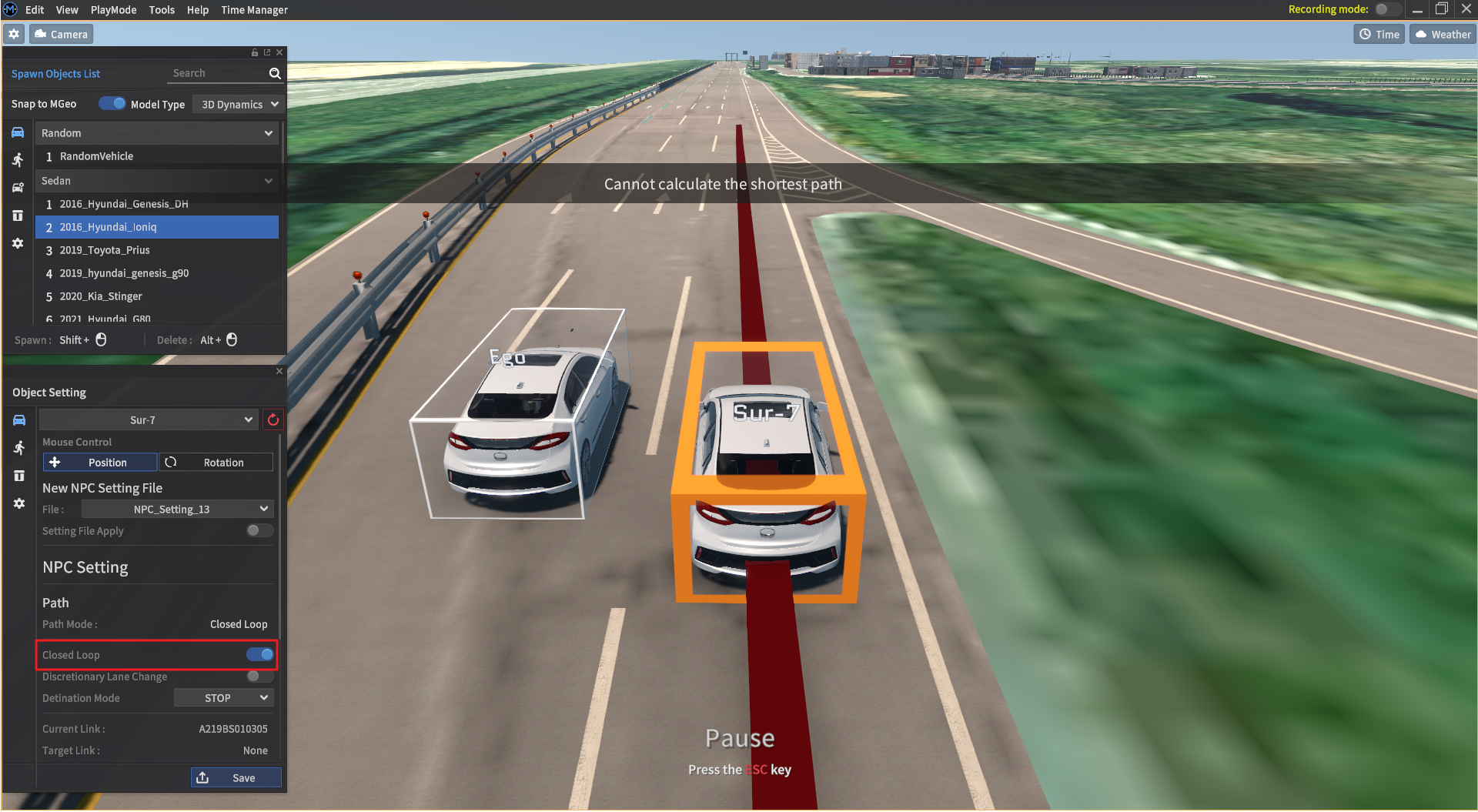
NPC 차량 최초 목적지 설정 후, 마우스 Drag를 이용해 NPC 차량 위치 이동 시 Viz Path 생성 불가 현상 개선
