센서 설정 파라미터
이 섹션에서는 센서 종류에 따른 설정 파라미터를 설명한다.
Camera
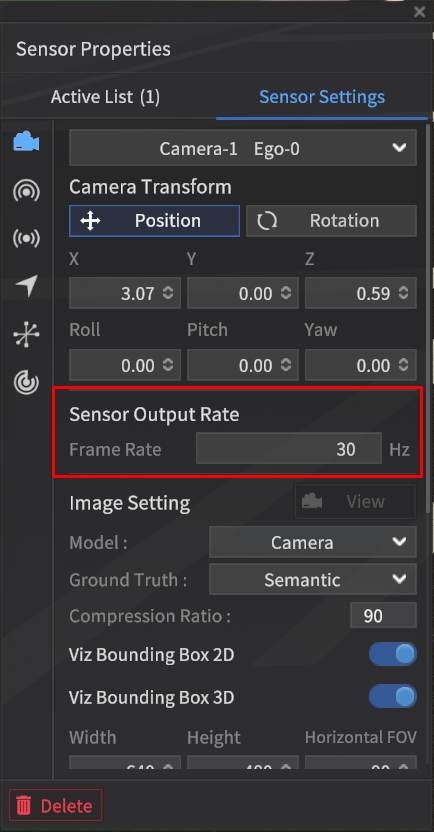
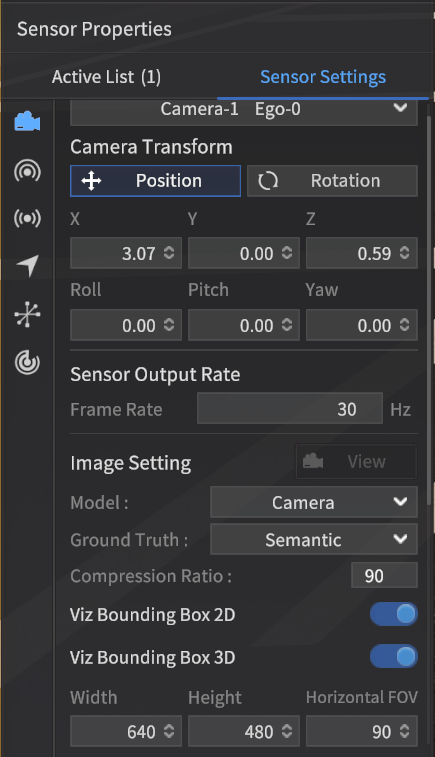
카메라의 X, Y, Z (차량 축 기준), Roll, Pitch, Yaw, 해상도, FOV, Ground Truth 출력 여부를 설정한다.

Frame Rate(Hz)
Camera 센서의 데이터 전송 주기를 지정한다.
 Option → Target FPS 값 및 시뮬레이터 FPS 에 따라 설정한 Frame Rate 보다 낮게 전송될 수 있음
Option → Target FPS 값 및 시뮬레이터 FPS 에 따라 설정한 Frame Rate 보다 낮게 전송될 수 있음5 ~ 60Hz 까지 1Hz 단위로 입력 가능
Model
카메라 센서에서 지원하는 모델을 선택한다.
Camera : 기본 모델
FishEyeCamera: Camera Model 과 Parameter 는 동일하나, 어안 렌즈가 적용된 카메라 모델
LabCamera: Camera Model 과 기능 및 Parameter 는 동일하나, 외형이 다른 카메라 모델 ADD-ON SERVICE
PhysicalCamera : 실제 카메라 포멧을 지원하는 모델 ADD-ON SERVICE
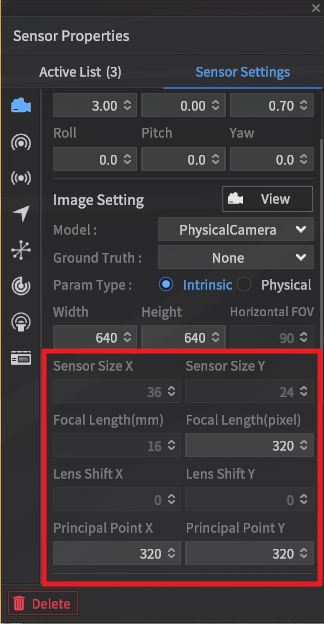
Physical Camera 에 한하여 Radial Distortion Parameter (k1, k2, k3) 설정이 가능하다. 24.R1.0 UPDATE
FishEyeCamera: Camera Model 과 Parameter 는 동일하나, 어안 렌즈가 적용된 카메라 모델
LabCamera: Camera Model 과 기능 및 Parameter 는 동일하나, 외형이 다른 카메라 모델 ADD-ON SERVICE
PhysicalCamera : 실제 카메라 포멧을 지원하는 모델 ADD-ON SERVICE
Physical Camera 에 한하여 Radial Distortion Parameter (k1, k2, k3) 설정이 가능하다. 24.R1.0 UPDATE
LIMOCamera: Ground Truth 속성으로 None (Intensity) 과 Depth 타입 지원 ADD-ON SERVICE
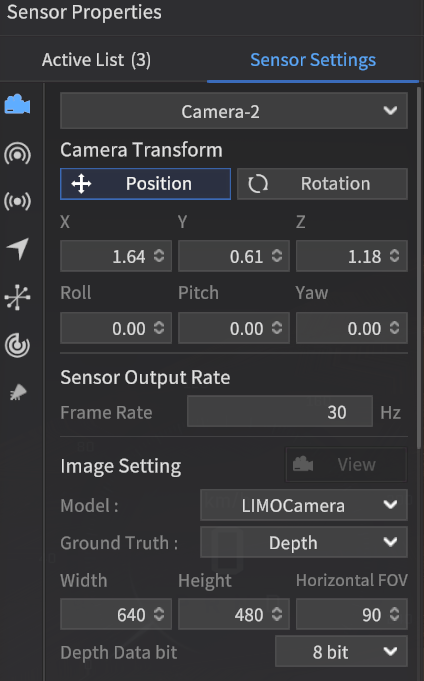
LIMO Camera 모델은 23.R1.0 버전부터 추가되었다.
Model 별 Camera 센서에서 검출한 객체의 View 화면은 아래와 같다.

Camera View
Ground Truth
Ground Truth 는 시뮬레이터 상 카메라 센서에서 검출하는 정답 데이터이다.
카메라 센서 모델에서는 정답 데이터의 타입으로 아래와 같은 형식을 지원하며,
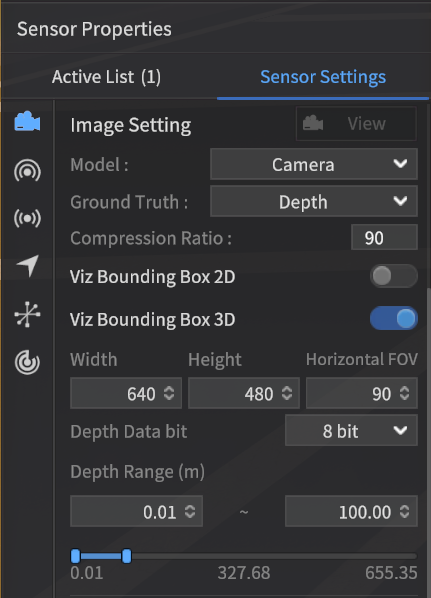
Depth 타입 선택 시에만 새로운 Parameter 가 추가됨
Intensity : RGB 이미지
Semantic : Semantic 이미지
Instance : Instance 이미지
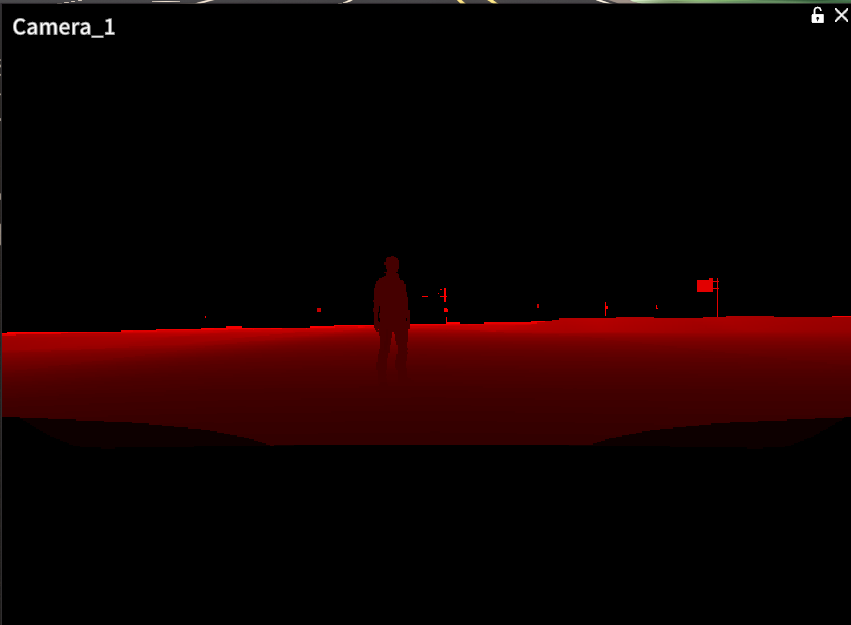
Depth : Depth 이미지
FishEye Camera 모델에서는 Depth 타입을 지원하지 않는다.
Depth 타입을 선택하면 아래의 Parameter 를 추가로 설정해야 한다.
Depth Data bit
Depth Data를 표현하는데 사용할 bit 수
실질적인 Depth의 Resolution을 결정하는 변수
선택 가능한 값 : 8, 16 bit
Depth Range (m)
Min Depth
Depth GT를 출력하는 최소 거리
최소 거리보다 가까운 Object는 검은색 (0)으로 표현
Max Depth
Depth GT를 출력하는 최대 거리
최대 거리보다 먼 Object는 검은색 (0)으로 표현
Depth Range가 [0.01, 655.35]인 구간에서 Depth GT를 출력할 Custom Range 선택 가능
센서 캡처 기능을 이용하여 각 GT 타입에 따른 정답 데이터 이미지를 생성할 수 있다.
None | Semantic | Instance | Depth |
|---|---|---|---|
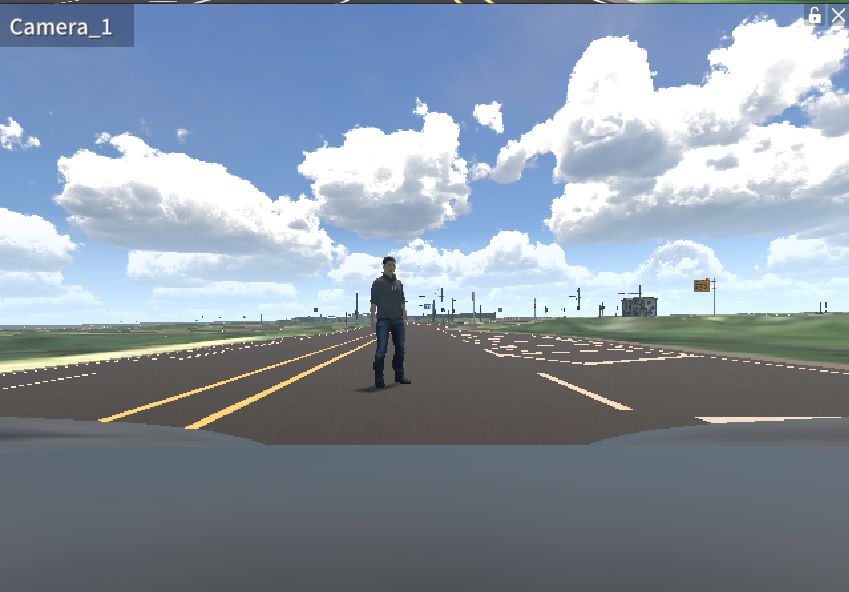 | 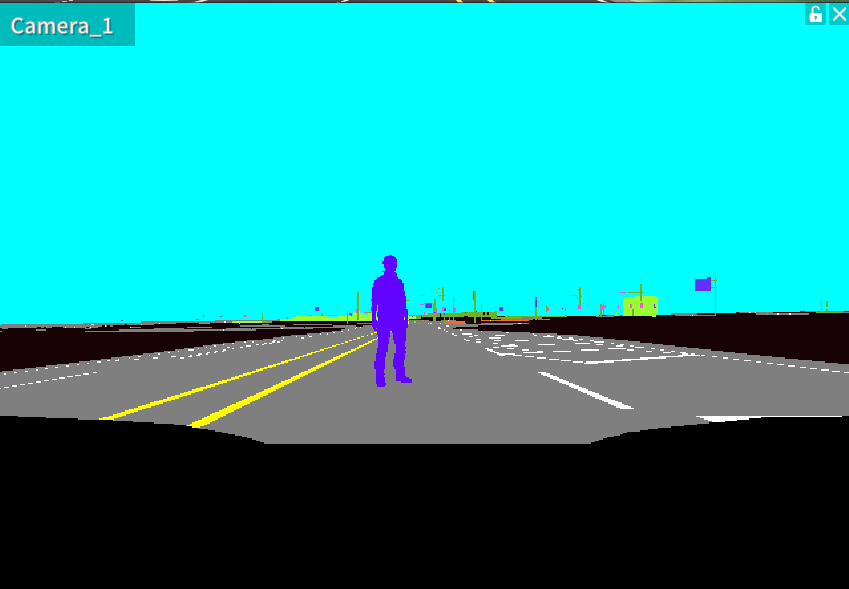 | 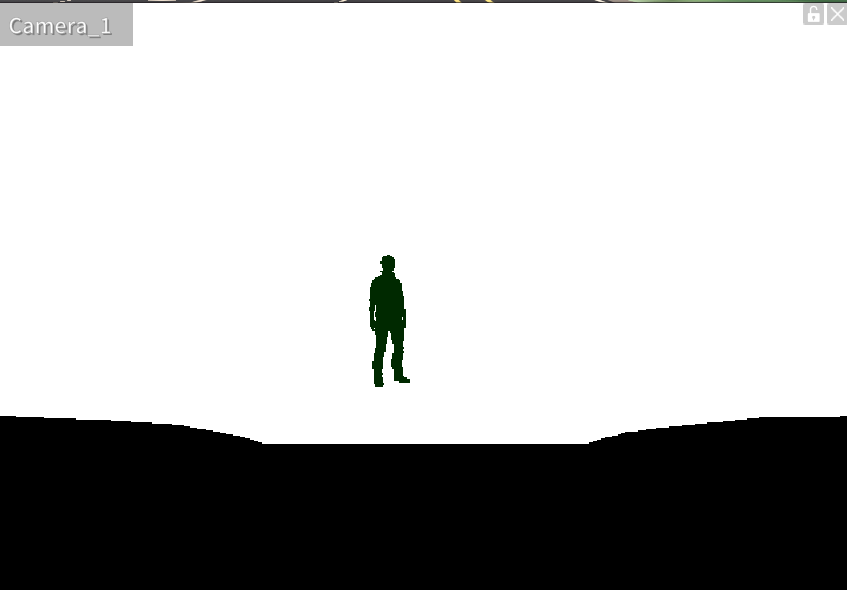 |  |
Depth 타입의 경우, 시뮬레이터에 생성하는 이미지의 크기 및 출력 속도(HZ)에 따라 메모리 사용량이 증가할 수 있다.
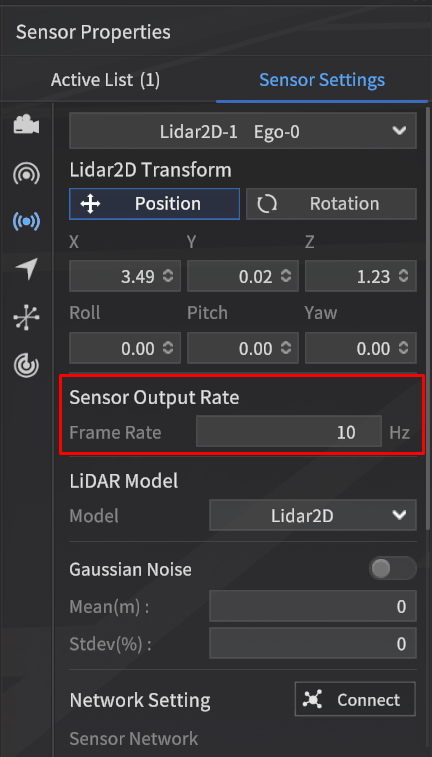
2D LiDAR
2D LiDAR의 X, Y, Z (차량 축 기준), Roll, Pitch, Yaw, Model, Intensity Type 을 설정한다.

Rotation Rate (Hz)
2D LiDAR 센서의 데이터 전송 주기를 지정한다.
- ROS Network >
roslaunch명령어 입력 시 RPM 옵션 수정 필요
( 하단 LiDAR ROS 네트워크 세팅 참고 : 센서 통신 프로토콜 | 2D-LiDAR ) - Option > Target FPS 값 및 시뮬레이터 FPS 에 따라 설정한 Rotation Rate 보다 낮게 전송될 수 있음
- LiDAR 모델 별로 설정할 수 있는 범위가 다름
센서 노이즈 관련 정보는 Sensor Noise 생성하기 를 참고한다.
Gaussian Noise
2D LiDAR의 Distance 값에 대해 Gaussian Noise를 적용할 수 있다.
Toggle On/Off 로 적용 여부 결정 가능
Parameters
Mean : Noise 분포의 평균 값 (단위: m, 범위 : -1~1m, Type: Float) 24.R1.0 UPDATE
Stdev : Noise 분포의 거리 대비 표준편차 값 (단위: %, 범위 0~1%, Type: Float)
센서 노이즈 관련 정보는 Sensor Noise 생성하기 를 참고한다.
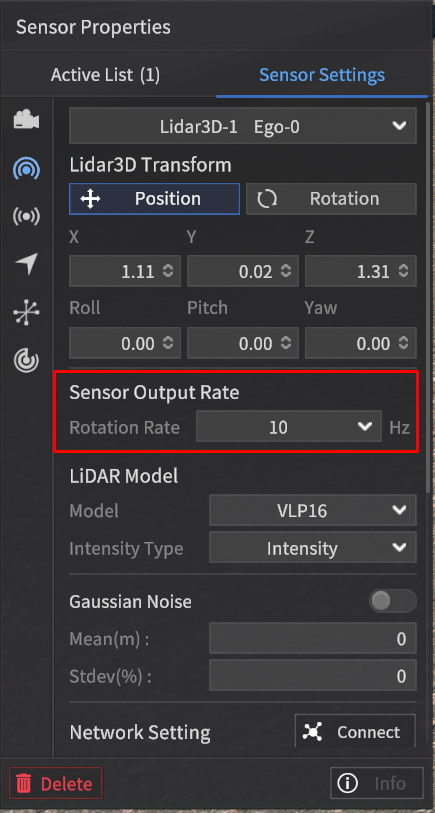
3D LiDAR
3D LiDAR의 X, Y, Z (차량 축 기준), Roll, Pitch, Yaw, Model, Intensity Type 을 설정한다.

Rotation Rate (Hz)
3D LiDAR 센서의 데이터 전송 주기를 지정한다.
- ROS Network >
roslaunch명령어 입력 시 RPM 옵션 수정 필요
( 하단 LiDAR ROS 네트워크 세팅 참고 : 센서 통신 프로토콜 | 3D-LiDAR ) - Option > Target FPS 값 및 시뮬레이터 FPS에 따라 설정한 Rotation Rate보다 낮게 전송될 수 있음
- LiDAR 모델 별로 설정할 수 있는 범위가 다름
센서 노이즈 관련 정보는 Sensor Noise 생성하기 를 참고한다.
Gaussian Noise
3D LiDAR의 Distance 값에 대해 Gaussian Noise를 적용할 수 있다.
Toggle On/Off 로 적용 여부 결정 가능
Parameters
Mean : Noise 분포의 평균 값 (단위: m, 범위 : -1~1m, Type: Float) 24.R1.0 UPDATE
Stdev : Noise 분포의 거리 대비 표준편차 값 (단위: %, 범위 0~1%, Type: Float)
센서 노이즈 관련 정보는 Sensor Noise 생성하기 를 참고한다.
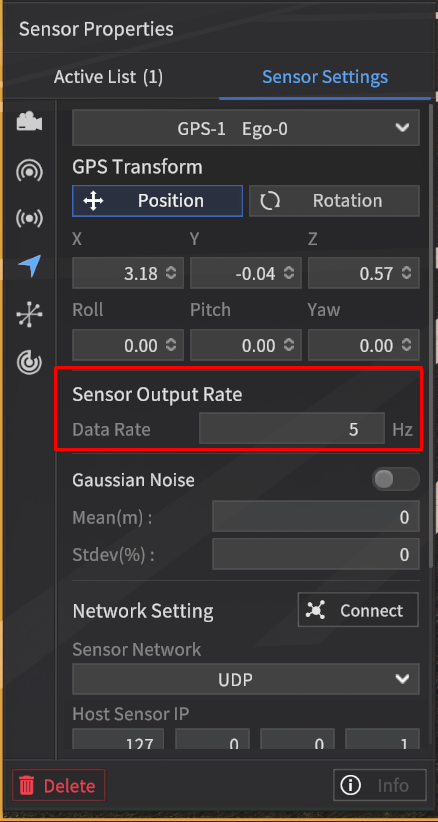
GPS
GPS의 X, Y, Z (차량 축 기준), Roll, Pitch, Yaw 값을 설정한다.

GPS센서에서는 Camera의 Width, Height, GT 타입과 같이 센서 자체의 특성을 나타내는 Parameter 값을 을 수정할 수 없다.
Data Rate(Hz)
GPS 센서의 데이터 전송 주기를 지정한다.
- Option → Target FPS 값 및 시뮬레이터 FPS에 따라 설정한 Data Rate보다 낮게 전송될 수 있다.
1 ~ 30Hz까지 1Hz 단위로 입력 가능 (기본값은 하단 이미지 참고) 24.R1.0 UPDATE
센서 노이즈 관련 정보는 Sensor Noise 생성하기 를 참고한다.
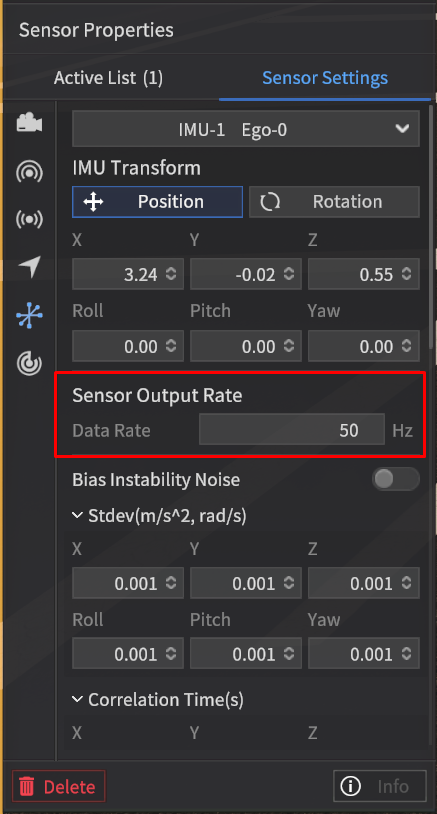
IMU
IMU의 X, Y, Z(차량 축 기준), Roll, Pitch, Yaw 값을 설정한다.

IMU 센서에서는 Camera의 Width, Height, GT 타입과 같이 센서 자체의 특성을 나타내는 Parameter 값을 을 수정할 수 없다.
Data Rate(Hz)
IMU 센서의 데이터 전송 주기를 지정한다.
- Option → Target FPS 값 및 시뮬레이터의 FPS에 따라 설정한 Data Rate보다 낮게 전송될 수 있음
5 ~ 50Hz까지 1Hz 단위로 입력 가능
센서 노이즈 관련 정보는 Sensor Noise 생성하기 를 참고한다.
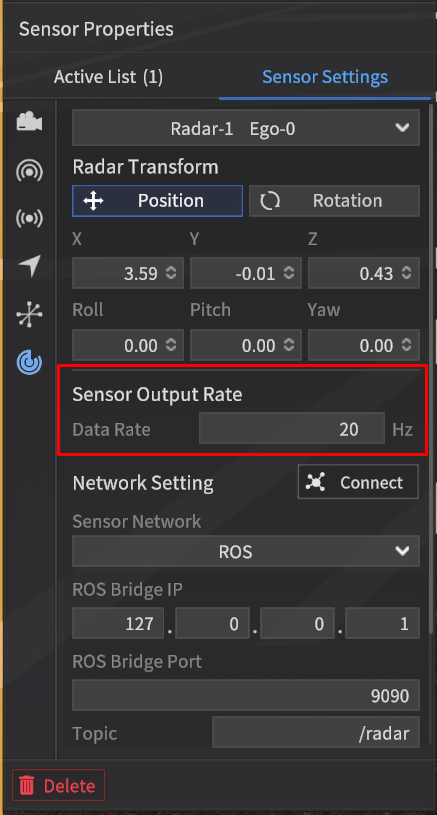
Radar
Radar의 X, Y, Z (차량 축 기준), Roll, Pitch, Yaw 값을 설정한다.

Radar 센서에서는 Camera의 Width, Height, GT 타입과 같이 센서 자체의 특성을 나타내는 Parameter 값을 을 수정할 수 없다.
Data Rate(Hz)
Radar 센서의 데이터 전송 주기를 지정한다.
- Option → Target FPS 값 및 시뮬레이터의 FPS에 따라 설정한 Data Rate보다 낮게 전송될 수 있음
5 ~ 20Hz까지 1Hz 단위로 입력 가능
Viz Radar Range 활성화 시, Radar Sensor를 통해 검출한 Object에 Radar Point Cloud (노란점) 표시함