센서 검출 데이터
이 섹션에서는 각 센서에서 검출한 데이터 형식 및 구조에 대해 설명한다.
3D LiDAR
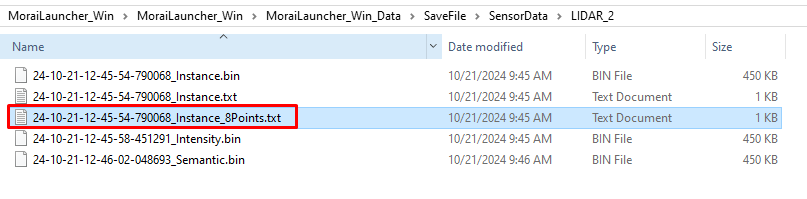
3D 라이다 센서 설정에 의해 생성되는 검출 데이터는 크게 점군 데이터 (Point Cloud)를 포함하는 bin 파일과 3D Bounding Box 정답 데이터를 포함하는 텍스트 파일로 구성된다.
Point Cloud 데이터
3D 라이다 센서에서 검출하는 Point Cloud 데이터는 아래와 같은 형식으로 저장되며, 센서 설정에 따라 Intensity, Semantic, Instance 타입을 가진다.
파일 생성 포맷 : bin 파일
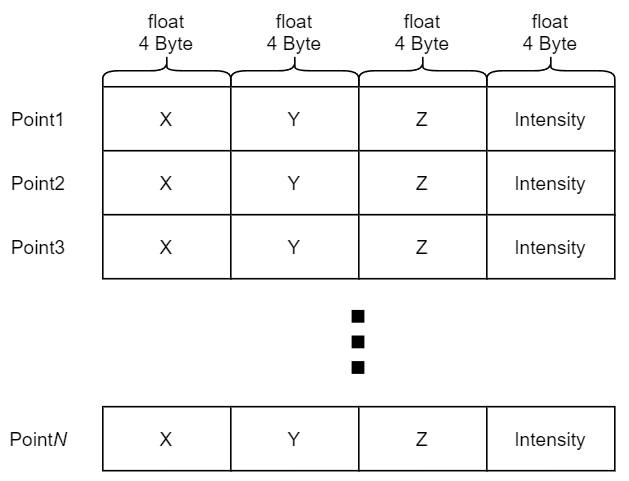
bin 파일 내 4 byte 씩 포인트 클라우드의 x, y, z, intensity 가 공백 없이 일렬로 저장되어 있음. 원점은 라이다를 마운트한 위치

파이썬 사용자의 경우, numpy 의 fromfile 을 통해서 아래와 같이 load 가 가능함
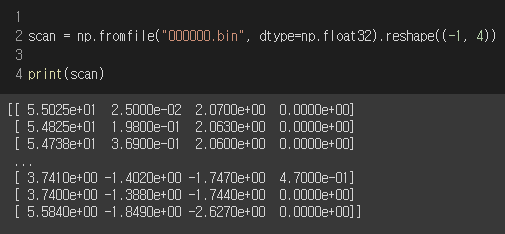
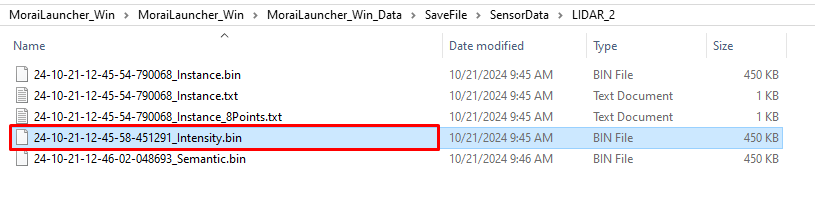
저장 위치는 SaveFile/SensorData/LIDAR_* 이며, 파일 이름은 포인트 클라우드를 저장한 날짜와 시간으로 정해짐
Intensity 타입
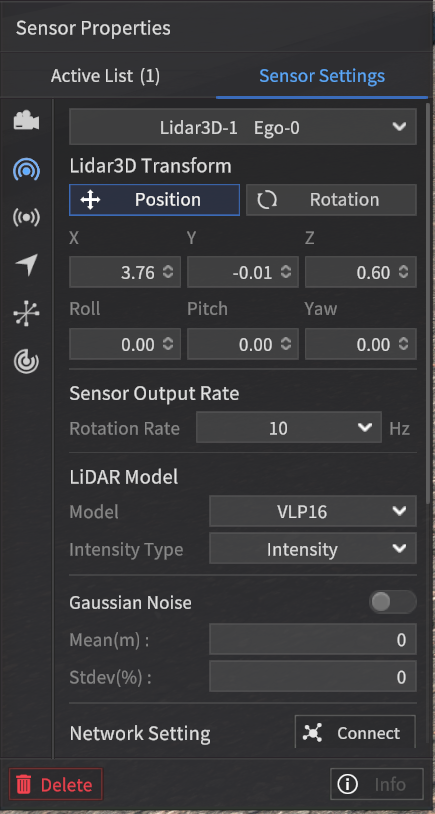
실제 LiDAR Sensor 와 동일하게 각 Point 의 Intensity 값을 출력하는 타입으로, 센서 설정에서 Intensity Type 을 Intensity 로 설정한다.
File 생성 포맷: bin 파일
한 줄에 한 Point에 대한 직교좌표계 기준 X, Y, Z 위치 값과 Intensity 값을 출력 (Point N 개인 경우 N 줄)
Intensity 값은 UDP와 같은 통신에 의해 전송 시에는 0 ~ 255 사이로 표시되나, 파일로 생성 시에는 0~1 사이의 값을 가진다.
Semantic 타입
Intensity Field 에 Intensity 대신 각 객체를 분류하는 값을 출력하는 타입으로, 센서 설정에서 Intensity Type 을 Semantic 으로 설정한다.
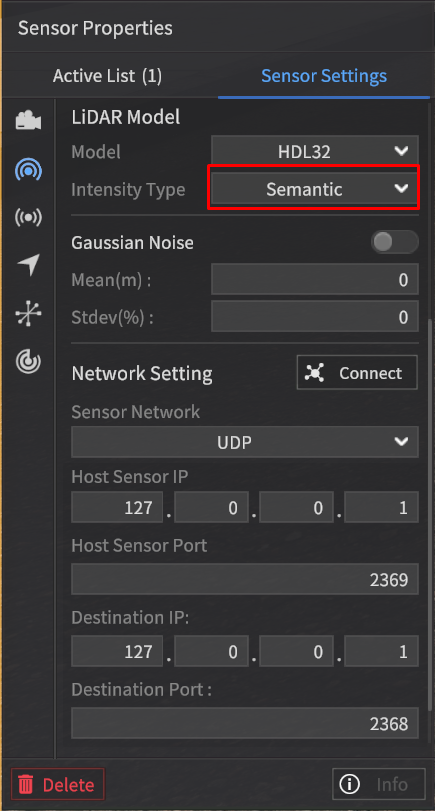
라이다 센서의 Semantic 타입 데이터는 카메라 센서의 Semantic 타입 데이터와 동일한 라벨링 색상표를 기준으로 매핑된 Intensity 값을 가진다.
관련한 자세한 내용은 카메라 센서의 Semantic Segmentation 데이터에 대한 라벨링 색상표를 참고한다.
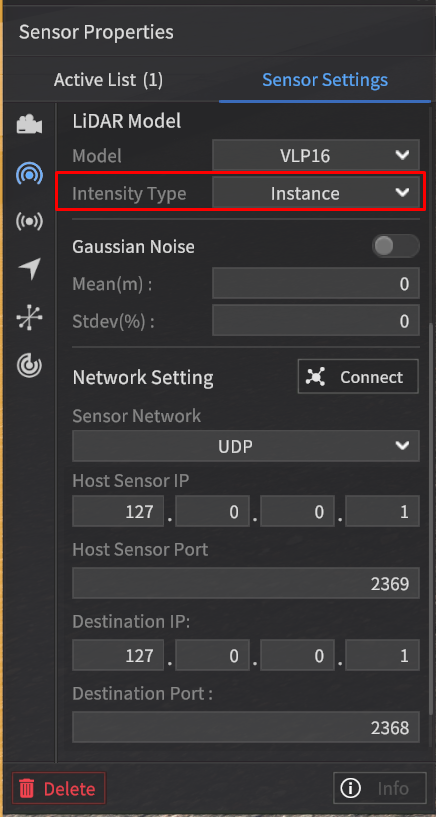
Instance 타입
Intensity Field 에 Intensity 대신 Vehicle, Pedestrian, Obstacle 객체를 분류한 값을 출력하는 타입으로, 센서 설정에서 Intensity Type 을 Instance 로 설정한다.
22.R4.2 버전까지 Instance Segmentation Label 규칙이 아래와 같이 적용됨
라이다 센서의 Instance 타입의 포인트 클라우드 데이터는 Vehicle, Pedestrian, Obstacle 객체 별로 아래 라벨링 맵에 따른 Intensity 값을 가진다.
Class | Intensity (unassigned integer 8) |
|---|---|
Vehicle | 0 ~ 149 |
Pedestrian | 150 ~ 254 |
Obstacle | Random (50, 100, 150, 200, 250, 45, 90, …) 50씩 증가 |
23.R1.0 버전부터 Instance Segmentation Label 규칙이 아래와 같이 바뀜
Vehicle. Pedestrian, Obstacle 객체의 구분 없이 배치한 순서부터 1부터 순차적으로 값 할당함
Vehicle. Ped, Obstacle 외 객체에 대해서는 할당 값 없음
예시: 24.R2.2 UPDATE
Color : Tag 구분 | Intensity Field Value | |
Tag of each point | Intensity PointCloud | Instance PointCloud |
Vehicle | intensity2 | 1 |
Pedestrian | intensity3 | 2 |
Pedestrian | intensity4 | 3 |
Obstacle | intensity5 | 4 |
Building | intensity6 | 0 |
POINT_OUTSIDE_FOV *Point가 LiDAR의 감지 거리 밖으로 나간 경우 | 0 | 0 |
… | … | … |
3D Bounding Box
LiDAR 센서 설정에서 Ground Truth (GT) 항목을 Instance 로 설정하면 이에 대한 3D Bounding Box 의 정답 데이터가 각각 아래의 형식 파일로 생성된다.
{ }_instance.txt 형식의 텍스트 파일로 생성
{ }_instance_8Points.txt 형식의 텍스트 파일로 생성
22.R2.0 버전부터:
AV (Autonomous Vehicle)의 인지 성능 향상을 위해 3D Bounding Box Object 의 3차원 회전각 모두 제공
3D Bounding Box 파일 (.txt)에 Yaw 외 Roll, Pitch 추가
차량 객체 하나를 기준으로 라이다 센서에서 검출하는 3D Bounding Box 정답 데이터 구조의 예시는 아래와 같다.
1] { }_instance.txt 파일

위 데이터 구조에 대하여 3D BBox 정답 데이터를 구성하는 각 값에 대한 정보는 아래와 같다.
0: 3D BBox 로 둘러싸인 클래스, 크게 세 가지 클래스 (Vehicle, Pedestrian, Object)로 분류
1-3: center_x, center_y, center_z of 3D BBox (단위 : m)
LiDAR 좌표계를 기준으로 계산된 Object 좌표계의 원점
LiDAR 좌표계는 X-axis : Forward, Y-axis : Left, Z-axis : Up인 ISO 8855 convention 을 따름
4-6: roll (x 방향), pitch (y 방향), yaw (z 방향) of 3D BBox (단위 : radian)
LiDAR 좌표계를 기준으로 계산된 Object 좌표계의 회전각
7-9: 검출한 객체의 크기, size_x (x 방향), size_y (y 방향), size_z (z 방향) (단위 : m)
10: 센서 기준에서 객체까지의 상대 거리 (단위 : m)
11-13: 센서 기준에서 객체에 대한 상대 속도, x, y, z 방향 (단위: m/s)
14: 검출된 객체의 unique ID
2개 이상의 Bounding Box 가 만들어지는 한 객체의 Ground Truth 값을 출력 시: 24.R2.2 UPDATE
unique ID 값은 아래와 같이 할당된다.
Pedestrian: 주체가 되는 사람은 Unique ID 할당 규칙에 따라 기존대로 배치되는 물체 순서대로 할당
Vehicle: Pedestrian 이 탑승한 물체 등 특정 복합 객체의 경우, 주체가 되는 사람의 Unique ID 에 10000을 곱한 뒤 +1 씩 증가
저장 위치는 위에서 설명한
bin파일과 동일하게 SaveFile/SensorData/LIDAR_* 이며, 파일 이름은 저장한 날짜와 시간으로 정해짐

2] { }_instance_8Points.txt 파일 24.R2.2 UPDATE

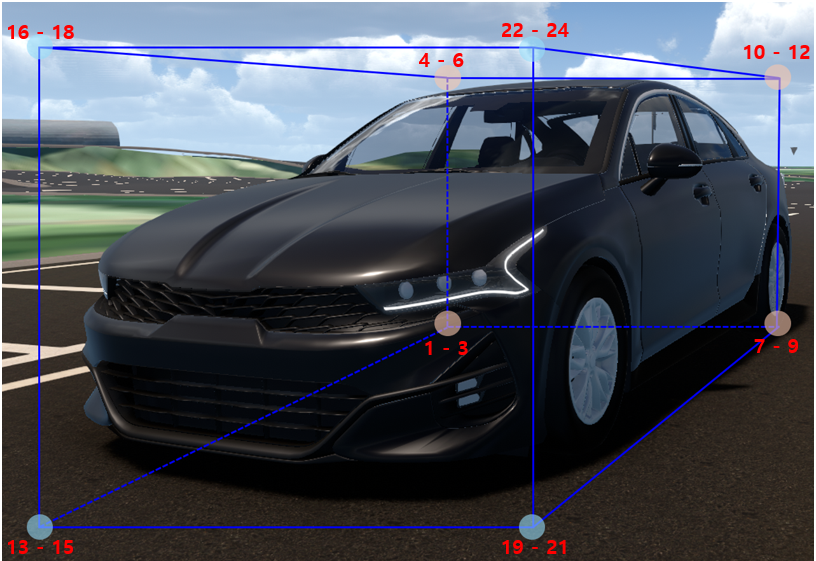
8 Points of 3D Bounding Box
위 데이터 구조에 대하여 3D BBox 정답 데이터를 구성하는 각 값에 대한 정보는 아래와 같다.
0: 3D BBox (직육면체 형태)의 8가지 외곽점으로 둘러싸인 클래스의 이름
1-3: left_down_back_x, left_down_back_y, left_down_back_z of 3D BBox (단위 : m)
3D BBox (직육면체 형태)의 좌측 하단 후면 x, y, z 좌표
4-6: left_up_back_x, left_up_back_y, left_up_back_z of 3D BBox (단위 : m)
3D BBox (직육면체 형태)의 좌측 상단 후면 x, y, z 좌표
7-9: right_down_back_x, right_down_back_y, right_down_back_z of 3D BBox (단위 : m)
3D BBox (직육면체 형태)의 우측 하단 후면 x, y, z 좌표
10-12: right_up_back_x, right_up_back_y, right_up_back_z of 3D BBox (단위 : m)
3D BBox (직육면체 형태)의 우측 상단 후면 x, y, z 좌표
13-15: left_down_front_x left_down_front_y, left_down_front_z of 3D BBox (단위 : m)
3D BBox (직육면체 형태)의 좌측 하단 전면 x, y, z 좌표
16-18: left_up_front_x, left_up_front_y, left_up_front_z of 3D BBox (단위 : m)
3D BBox (직육면체 형태)의 좌측 상단 전면 x, y, z 좌표
19-21: right_down_front_x, right_down_front_y, right_down_front_z of 3D BBox (단위 : m)
3D BBox (직육면체 형태)의 우측 하단 전면 x, y, z 좌표
22-24: right_up_front_x, right_up_front_y, right_up_front_z of 3D BBox (단위 : m)
3D BBox (직육면체 형태)의 우측 상단 전면 x, y, z 좌표
25-27: roll (x 방향), pitch (y 방향), yaw (z 방향) of 3D BBox (단위 : radian)
LiDAR 좌표계를 기준으로 계산된 Object 좌표계의 회전각
28: 센서 기준에서 객체까지의 상대 거리 (단위 : m)
29-31: 센서 기준에서 객체에 대한 상대 속도, x, y, z 방향 (단위: m/s)
32: 검출된 객체의 unique ID
2개 이상의 Bounding Box 가 만들어지는 한 객체의 Ground Truth 값을 출력 시:
unique ID 값은 아래와 같이 할당된다.
Pedestrian: 주체가 되는 사람은 Unique ID 할당 규칙에 따라 기존대로 배치되는 물체 순서대로 할당
Vehicle: Pedestrian 이 탑승한 물체 등 특정 복합 객체의 경우, 주체가 되는 사람의 Unique ID 에 10000을 곱한 뒤 +1 씩 증가
저장 위치는 위에서 설명한
bin파일과 동일하게 SaveFile/SensorData/LIDAR_* 이며, 파일 이름은 저장한 날짜와 시간으로 정해짐

Camera 센서 데이터
RGB 이미지
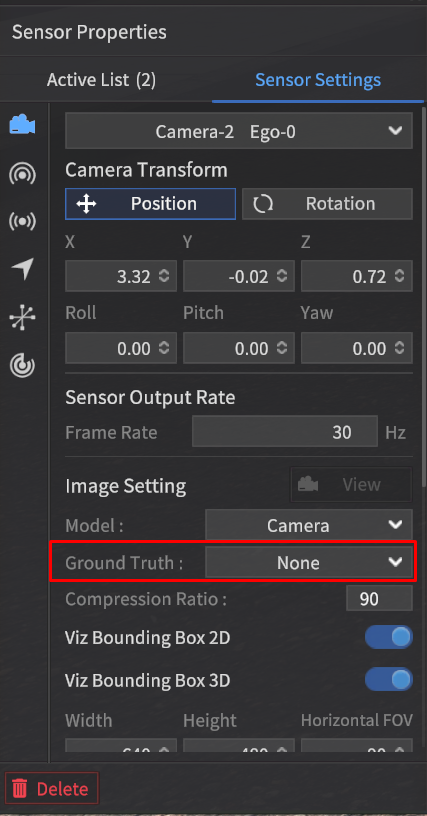
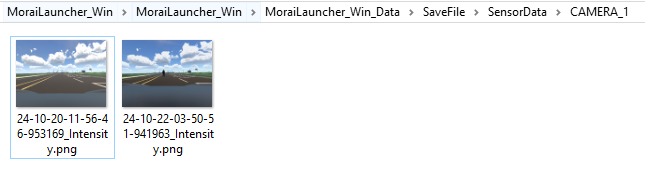
Ego 차량에 카메라를 장착 후, 카메라 설정에서 Ground Truth 항목을 Intensity 로 설정하면 RGB 형식의 검출 데이터가 생성된다.
File 생성 포맷: *.png 파일
센서의 캡처 기능을 이용하면 검출 데이터는 {시뮬레이터 설치 경로}/MoraiLauncher_Win/MoraiLauncher_Win_Data/SaveFile/SensorData/CAMERA_* 경로에 저장된다. 이때 파일 이름은 이미지를 저장한 날짜와 시간으로 정해지게 된다.
Semantic Segmentation 이미지
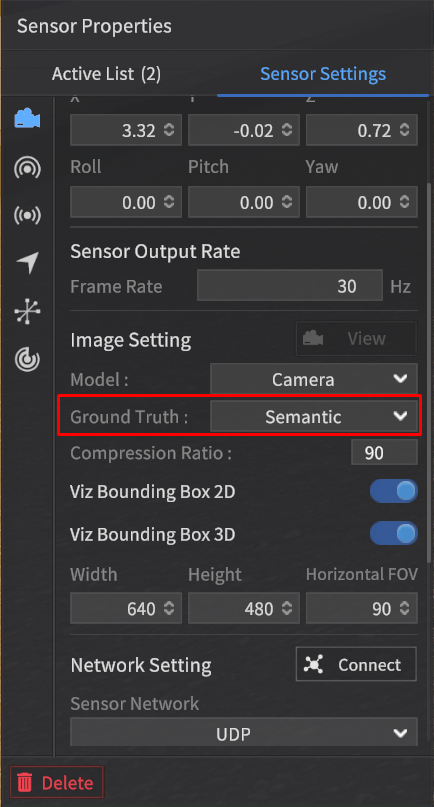
카메라 설정에서 Ground Truth 항목을 Semantic로 설정하면 Semantic Segmentation 방식으로 검출된 이미지 데이터가 생성된다.
File 생성 포맷 : png 파일
Semantic Segmentation 이미지 저장 위치와 파일 이름은 위의 RGB 이미지 방식과 동일함
라벨링 색상표
Semantic Segmentation 방식으로 검출된 데이터는 아래의 라벨링 색상표에 따라, 차량, 보행자, 차선과 같은 동일한 객체끼리 분류된 각 클래스 별 RGB 값으로 구성된다.
라이다 센서의 Semantic 타입 데이터 또한 카메라 센서 데이터와 동일한 라벨링 색상표를 따르므로, 아래 공식에 의한 LiDAR Semantic 값이 표에 추가되었다.
(LiDAR Semantic Value) = Rounds ((R + G + B) / 3)
* (예외 1): Sky 의 경우 LiDAR 에서는 나타나지 않으므로 값이 할당되지 않음
** (예외 2): 위 수식을 적용하면 Road Sign 은 Asphalt 값과 같기 때문에 +1하여 128로 할당함
*** (예외 3): Obstacle 로 배치하는 차량들은 Obstacle 이 아닌 Vehicle 로 분류
*** (예외 3.1): Obstacle 로 배치되는 이륜차는 사람이 탑승했을 경우 Vehicle, 탑승하지 않았을 경우 Obstacle 로 분류
Sensor type | Camera | 3D LiDAR | |||
Object | Class | R | G | B | Rounds((R + G + B) / 3) |
Vehicle | Vehicle | 255 | 2 | 2 | 86 |
Sedan | 255 | 60 | 60 | 125 | |
SUV | 255 | 75 | 75 | 135 | |
Truck | 255 | 90 | 90 | 145 | |
Bus | 255 | 105 | 105 | 155 | |
Van | 255 | 120 | 120 | 165 | |
Wagon 24.R1.0 UPDATE | 255 | 135 | 135 | 175 | |
MPV 24.R1.0 UPDATE | 255 | 150 | 150 | 185 | |
Pedestrian | Pedestrian | 98 | 2 | 255 | 118 |
Obstacle*** | Obstacle | 236 | 255 | 2 | 164 |
Road | Asphalt | 127 | 127 | 127 | 127 |
White Lane | 255 | 255 | 255 | 255 | |
Yellow Lane | 255 | 255 | 0 | 170 | |
Blue Lane | 0 | 178 | 255 | 144 | |
Crosswalk | 76 | 255 | 76 | 136 24.R1.0 UPDATE | |
Stop Line | 255 | 0 | 0 | 85 | |
Road Sign | 204 | 127 | 51 | 128** | |
Map Object | Traffic Light | 255 | 74 | 240 | 190 24.R1.0 UPDATE |
Traffic Sign | 99 | 48 | 250 | 132 | |
Sidewalk | 255 | 102 | 30 | 129 | |
Standing OBJ | 113 | 178 | 37 | 109 | |
Building | 153 | 255 | 51 | 153 | |
Road Edge | 178 | 178 | 178 | 178 | |
ETC | Sky | 0 | 255 | 255 | X* |
ETC | 23 | 2 | 6 | 10 | |
Ego Vehicle 24.R1.0 UPDATE | 0 | 0 | 0 | 0 | |
* 표에서 클래스 명은 객체 분류하기 위한 목적으로 작성한 것이며, 2D/3D BBOX 데이터의 클래스 값과 무관함
객체 종류
Vehicle : 배치 가능한 차량
Pedestrian : 배치 가능한 보행자 및 자전거, 보행기 등 탑승 가능한 물체에 탑승한 사람
Obstacle : 배치 가능한 사물
Road : Map에 기본적으로 구성되어 있는 도로 관련 표시 사항
Map Object : Map에 기본적으로 구성되어 있는 사물
ETC : 기타 물체 및 하늘
Ego Vehicle: 센서가 장착된 자 차량 ( ⚠️ Multi Ego 는 해당하지 않음) 24.R2.0 UPDATE
라벨링 색상표 적용된 규칙
LiDAR Semantic Value 는 Camera RGB 값의 평균 값의 정수 반올림한 값
Vehicle, Pedestrian, Obstacle 객체의 경우, 세부 클래스로 분류되지 않으면 기본 값이 할당되며, 세부 클래스로 분류된 경우 해당 종류 별 값 할당
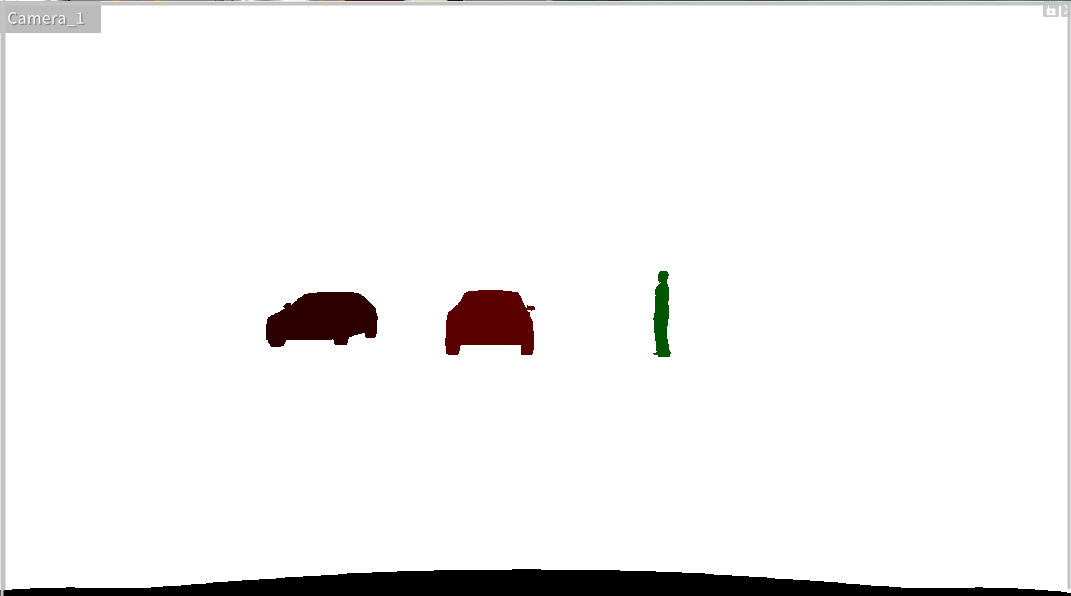
Instance 이미지
카메라 설정에서 Ground Truth 항목을 Instance 로 설정하면 Instance 라벨링에 따른 이미지가 검출된다.
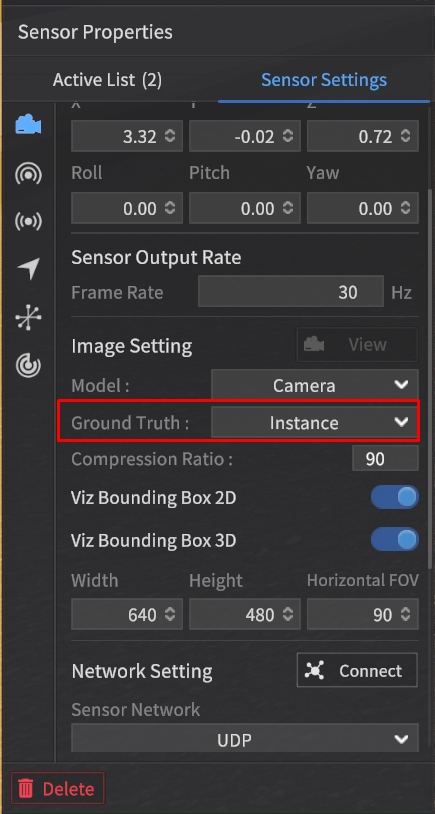
이미지 생성 포맷: png 파일
Instance 라벨 이미지는 같은 클래스라도 다른 픽셀 값으로 라벨링 되어 있어서 클래스 안에 ID 를 구분하도록 만듬
2D Bounding Box
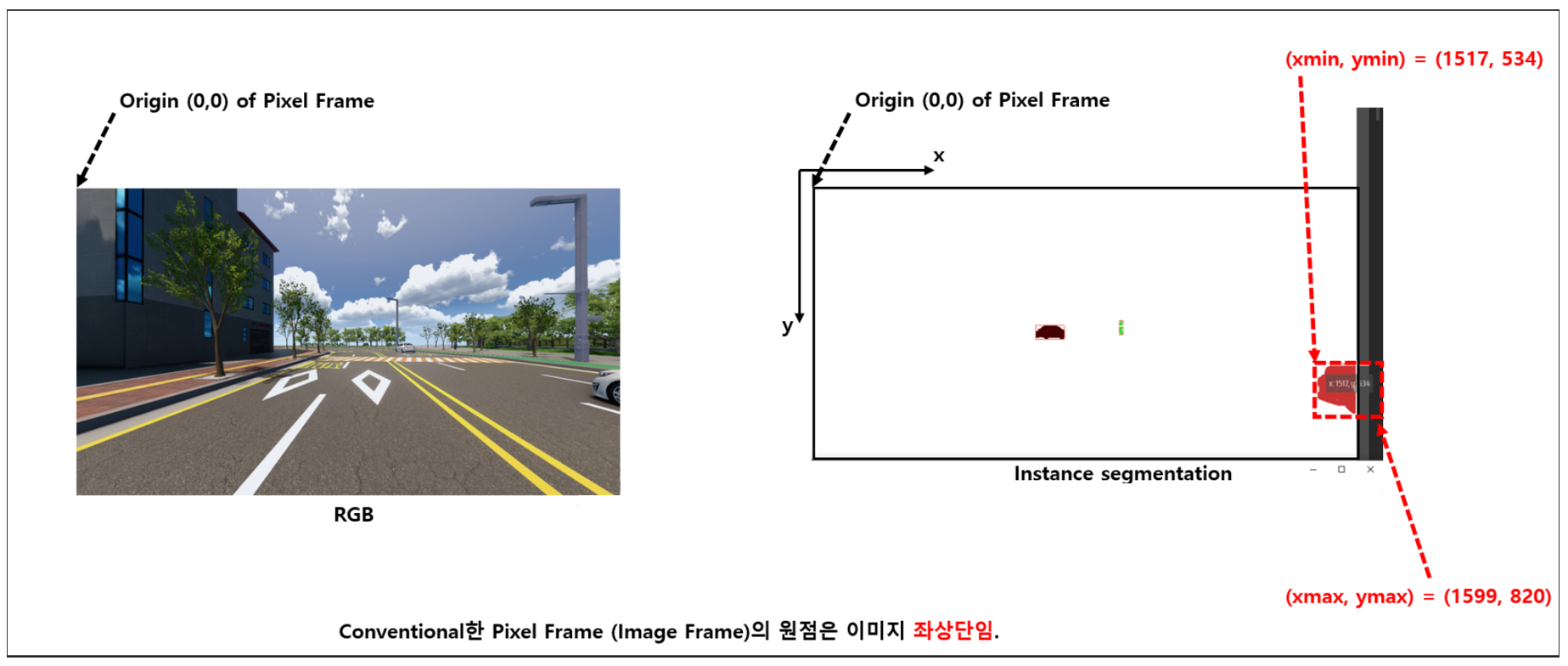
2D Bounding Box (2D BBox) 는 카메라 센서에서 검출한 객체를 둘러싼 2차원 직사각형 형태의 정답 데이터로 Target Object 들의 위치를 나타낸다.
타겟 객체의 위치 좌표 정보는 이미지의 좌측 상단을 원점으로 하는 Pixel 좌표계를 기준으로 2D Bounding Box 의 좌측 상단 (Min) x, y + 우측 하단 (Max) x, y 의 총 4개 값으로 구성된다.
검출 데이터 형식
2D Bounding Box (BBox) 데이터는 GT 타입을 Instance 로 설정하여 캡처하면 해당 Instance 이미지와 함께 텍스트 파일로 생성된다.
23.R1.0 버전에서는 2D BBox의 데이터 구조가 아래와 같이 바뀌었다.
기존 6개 데이터 구조에 Instance Color (RGBA) 추가되어 객체 한 개 기준으로 총 7개의 데이터로 구성
{객체의 태그명} + {픽셀 좌표계 좌측 상단 (Min) x, y 값} + {픽셀 좌표계 우측 하단 (Max) x, y 값} + 객체의 unique ID + Instance Color (RGBA)
2D BBOX 표현값 정의 (단위 : pixels)
2D_BBOX_Xmin : 2D Bounding Box 의 좌측 상단 x 좌표
2D_BBOX_Ymin : 2D Bounding Box 의 좌측 상단 y 좌표
2D_BBOX_Xmax : 2D Bounding Box 의 우측 하단 x 좌표
2D_BBOX_Ymax : 2D Bounding Box 의 우측 하단 y 좌표
생성 포맷: txt 파일
데이터 구조: 총 7개의 데이터로 구성 (객체 한 개 기준)
Index | Data | 비고 |
|---|---|---|
1 | Class Name of detected Object | Class definition의 Tag와 동일 |
2 | 2D_BBOX_Xmin | |
3 | 2D_BBOX_Ymin | |
4 | 2D_BBOX_Xmax | |
5 | 2D_BBOX_Ymax | |
6 | Unique ID of the detected Object | MORAI SIM 에서 해당 Object 에게 할당된 unique ID 2개 이상의 Bounding Box 가 만들어지는 한 객체: 24.R2.2 UPDATE unique ID 값의 할당 규칙은 3D LiDAR 3D BBOX 와 동일함
|
7 | Instance Color (RGBA) | Instance.png 에서 해당 object 가 가지는 색상을 의미 RGB 3체널은 Semantic color (Class definition 에서 해당 object 의 Tag 에 할당한 색상)을 의미하며, A는 Semantic class 군에서 해당 object 가 가지는 고유한 ID 를 의미함 |
예시:
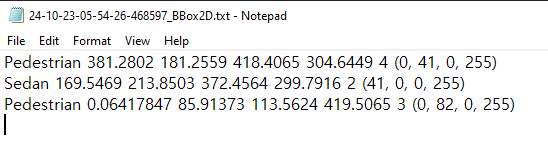
검출 가능 Target Object: Vehicle, Pedestrian, Obstacle, Traffic Light.
3D Bounding Box
23.R1.0 버전에서는 카메라 센서에서 검출한 객체에 대한 3D BBox 데이터 생성 기능을 제공한다.
3D Bounding Box (BBox) 는 카메라 센서에서 검출한 객체를 둘러싼 3차원 직육면체 형태의 정답 데이터로 Target Object 들의 위치를 나타낸다.
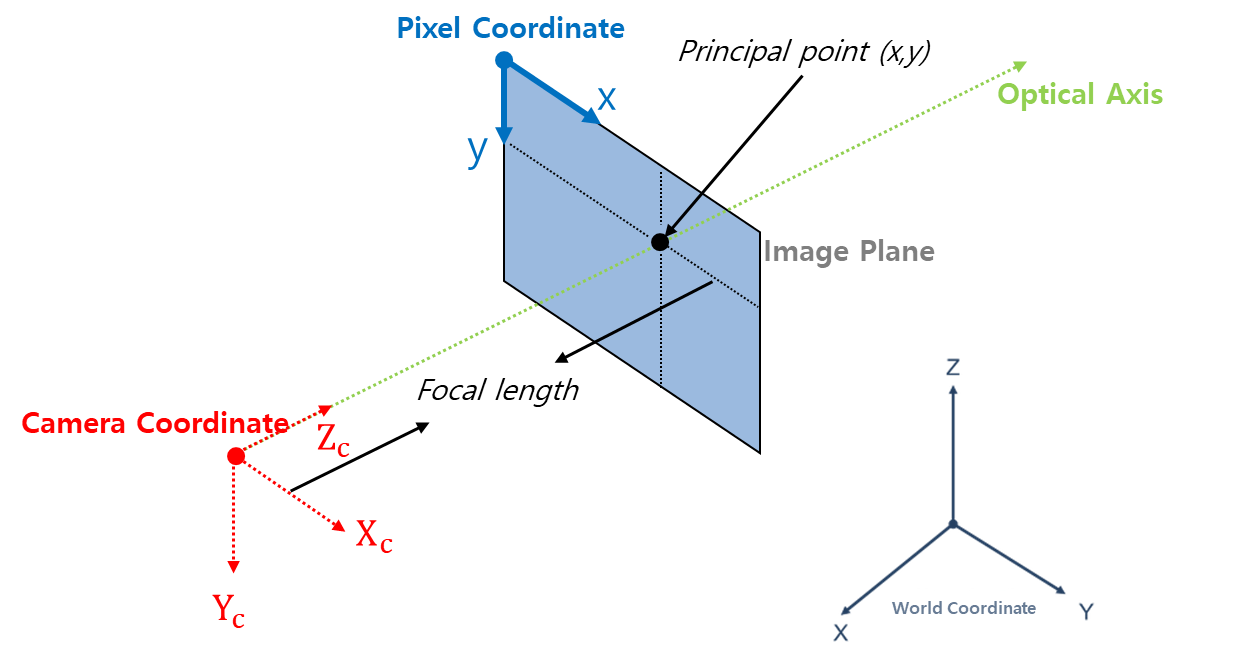
타겟 객체의 위치 좌표 정보는 Camera 좌표계를 기준으로 3D BBox의 8 point 꼭짓점으로 구성된다.

이 중 1개 point에 대한 Camera 좌표계는 Camera 가 바라보는 방향의 축을 Optical Axis 라고 할 때 아래의 (x, y, z) 로 구성된다.
X : Right
Y : Down
Z : Forward (=Optical Axis)
검출 데이터 형식 24.R2.2 UPDATE
3D Bounding Box 데이터는 GT 타입을 Instance 로 설정하여 캡처하면 해당 Instance 이미지와 함께 텍스트 파일로 생성된다.
3D BBOX 표현값 정의 (단위 : m)
3D_BBOX_X1, 3D_BBOX_Y1, 3D_BBOX_Z1 : 1번 Point 의 Camera 좌표계 기준 X, Y, Z 좌표
3D_BBOX_X2, 3D_BBOX_Y2, 3D_BBOX_Z2 : 2번 Point 의 Camera 좌표계 기준 X, Y, Z 좌표
3D_BBOX_X3, 3D_BBOX_Y3, 3D_BBOX_Z3 : 3번 Point 의 Camera 좌표계 기준 X, Y, Z 좌표
3D_BBOX_X4, 3D_BBOX_Y4, 3D_BBOX_Z4 : 4번 Point 의 Camera 좌표계 기준 X, Y, Z 좌표
3D_BBOX_X5, 3D_BBOX_Y5, 3D_BBOX_Z5 : 5번 Point 의 Camera 좌표계 기준 X, Y, Z 좌표
3D_BBOX_X6, 3D_BBOX_Y6, 3D_BBOX_Z6 : 6번 Point 의 Camera 좌표계 기준 X, Y, Z 좌표
3D_BBOX_X7, 3D_BBOX_Y7, 3D_BBOX_Z7 : 7번 Point 의 Camera 좌표계 기준 X, Y, Z 좌표
3D_BBOX_X8, 3D_BBOX_Y8, 3D_BBOX_Z8 : 8번 Point 의 Camera 좌표계 기준 X, Y, Z 좌표
3D_BBOX_X1, 3D_BBOX_Y1 : 1번 Point를 Image Plane으로 투영하였을 때의 X, Y 좌표
3D_BBOX_X2, 3D_BBOX_Y2 : 2번 Point를 Image Plane으로 투영하였을 때의 X, Y 좌표
3D_BBOX_X3, 3D_BBOX_Y3 : 3번 Point를 Image Plane으로 투영하였을 때의 X, Y 좌표
3D_BBOX_X4, 3D_BBOX_Y4 : 4번 Point를 Image Plane으로 투영하였을 때의 X, Y 좌표
3D_BBOX_X5, 3D_BBOX_Y5 : 5번 Point를 Image Plane으로 투영하였을 때의 X, Y 좌표
3D_BBOX_X6, 3D_BBOX_Y6 : 6번 Point를 Image Plane으로 투영하였을 때의 X, Y 좌표
3D_BBOX_X7, 3D_BBOX_Y7 : 7번 Point를 Image Plane으로 투영하였을 때의 X, Y 좌표
3D_BBOX_X8, 3D_BBOX_Y8 : 8번 Point를 Image Plane으로 투영하였을 때의 X, Y 좌표
생성 포맷: txt 파일
데이터 구조: 총 43개의 데이터로 구성 (객체 한 개 기준)
Index | Label | 비고 |
|---|---|---|
1 | Class Name of detected Object | Class definition 의 Tag 와 동일 |
2 ~ 4 | 3D_BBOX_X1, Y1, Z1 | Camera 좌표계 기준 |
5 ~ 7 | 3D_BBOX_X2, Y2, Z2 | Camera 좌표계 기준 |
8 ~ 10 | 3D_BBOX_X3, Y3, Z3 | Camera 좌표계 기준 |
11 ~ 13 | 3D_BBOX_X4, Y4, Z4 | Camera 좌표계 기준 |
14 ~ 16 | 3D_BBOX_X5, Y5, Z5 | Camera 좌표계 기준 |
17 ~ 19 | 3D_BBOX_X6, Y6, Z6 | Camera 좌표계 기준 |
20 ~ 22 | 3D_BBOX_X7, Y7, Z7 | Camera 좌표계 기준 |
23 ~ 25 | 3D_BBOX_X8, Y8, Z8 | Camera 좌표계 기준 |
26 ~27 | 3D_BBOX_X1, Y1 | Image Plane 기준 |
28 ~ 29 | 3D_BBOX_X2, Y2 | Image Plane 기준 |
30 ~ 31 | 3D_BBOX_X3, Y3 | Image Plane 기준 |
32 ~ 33 | 3D_BBOX_X4, Y4 | Image Plane 기준 |
34 ~ 35 | 3D_BBOX_X5, Y5 | Image Plane 기준 |
36 ~ 37 | 3D_BBOX_X6, Y6 | Image Plane 기준 |
38 ~ 39 | 3D_BBOX_X7, Y7 | Image Plane 기준 |
40 ~41 | 3D_BBOX_X8, Y8 | Image Plane 기준 |
42 | Unique ID of detected Object | MORAI SIM 에서 해당 Object 에게 할당된 unique ID 2개 이상의 Bounding Box 가 만들어지는 한 객체: 24.R2.2 UPDATE unique ID 값의 할당 규칙은 카메라 센서 2D BBOX 와 동일함
|
43 | Instance Color (RGBA) | 2D BBOX 에서의 Instance Color 와 동일 |
예시:

검출 가능 Target Object: Vehicle, Pedestrian, Obstacle
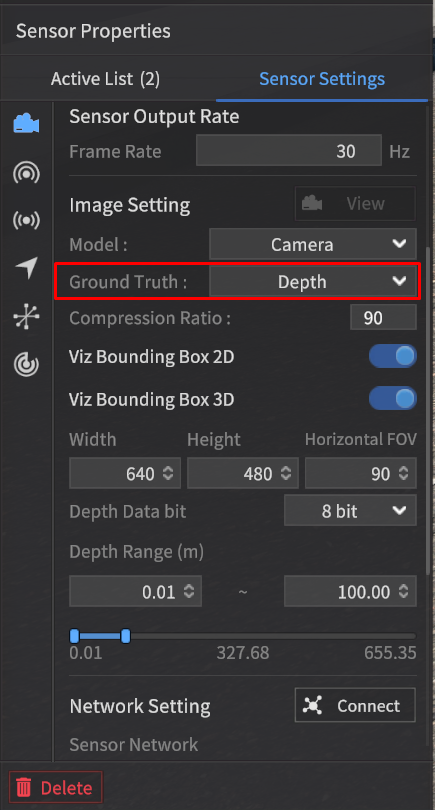
Depth 이미지
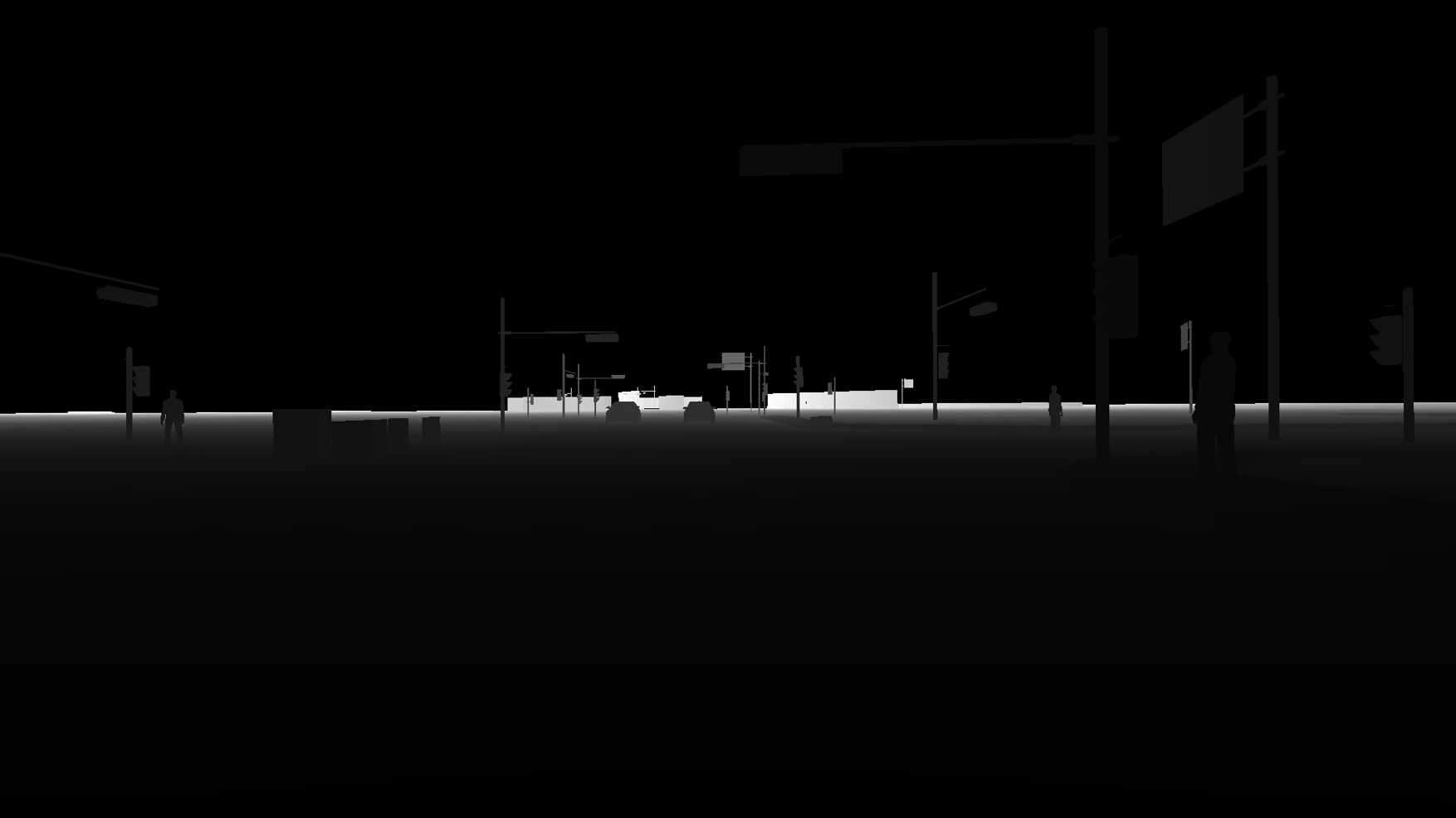
카메라 설정에서 Ground Truth 항목을 Depth 로 설정하면 객체의 깊이 값을 검출하여 Depth 이미지로 생성한다.
Depth GT 를 출력할 Range 내에서 거리가 멀어질 수록 흰색에 가까워짐
최소 거리보다 가까운 Object 는 검은색 (0)으로 표시됨
최대 거리보다 먼 Object 는 검은색 (0)으로 표시됨
View 기능으로 Depth GT 데이터를 확인하면 아래의 화면과 같이 각 설정한 Depth Data bit 범위 내 ([0,28] or [0,216])에서 빨간색 픽셀로 표시된다.

RGB Image
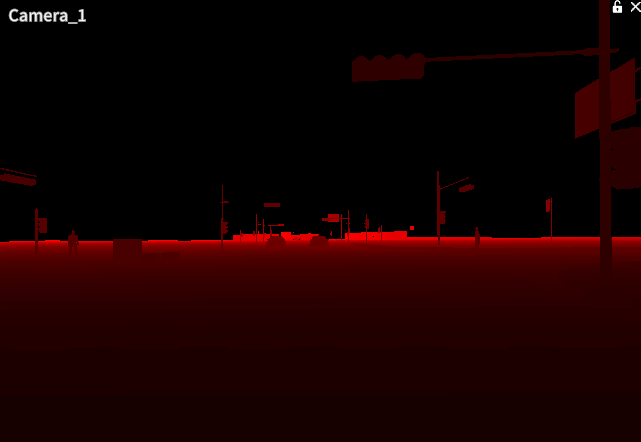
Depth Image (Simulator 상 Camera View)
센서 캡처 기능으로 Depth GT 를 아래와 같은 이미지 파일 (. png)로 생성할 수 있다.
Depth Image (png 파일)
생성 포맷: png 파일
저장 위치는 SaveFile/SensorData/CAMERA_* 이며, 파일 이름은 이미지를 저장한 날짜와 시간으로 정해짐

기존 Depth GT 는 8 bits 이미지로만 생성되었으나, 23.R1.0에서는 카메라 센서의 Depth 이미지 생성 기능이 개선되어
8bit 설정 시 8bit Image, 16bit 설정 시 16bit Image 로 생성 가능하다.
GPS 데이터
File 생성 포맷 : txt 파일
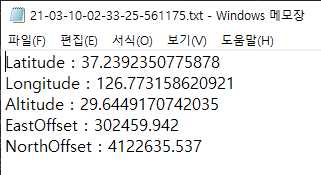
GPS 데이터 구조는 아래와 같다.
1: Latitude 정보이며, North 는 양수, South 는 음수를 나타냄 (단위: deg)
2: Longitude 정보이며, East는 양수, West는 음수를 나타냄 (단위: deg)
3: Altitude 정보 (단위: m)
4: EastOffset (단위 : m), * UTM 맵 원점을 기준으로, 동쪽 방향의 Offset 값 (Map 별로 고정된 상수값)
5: NorthOffset (단위 : m), * UTM 맵 원점을 기준으로, 북쪽 방향의 Offset 값 (Map 별로 고정된 상수값)
저장 위치는 SaveFile/SensorData/GPS_* 이며, 파일 이름 또한 저장한 날짜와 시간으로 정해짐
IMU 데이터
File 생성 포맷 : txt 파일
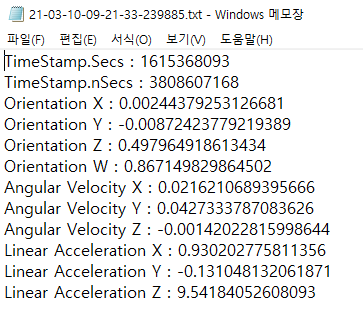
IMU 데이터 구조는 아래와 같다.
1-2 : TimeStamp. 1은 초 단위, 2는 나노초 단위
3-6 : Orientation X, Y, Z, W. 센서의 자세를 쿼터니안으로 표현
7-9 : Angular Velocity X, Y, Z. 각속도의 X, Y, Z 축 기준 component (단위 : rad/s)
10-12 : Linear Acceleration X, Y, Z. 가속도의 X, Y, Z 축 기준 component (단위 : m/s2)
저장 위치는 SaveFile/SensorData/IMU_* 이며, 파일 이름 또한 저장한 날짜와 시간으로 정해짐
24.R2 버전에서부터 IMU 위치에 따른 Acceleration 값을 계산할 수 있도록 기능을 개발해 IMU 센서 데이터가 고도화됨 24.R2.0 UPDATE
Radar 데이터
저장 포맷: bin 파일
bin 파일 내 각 radar measurement 의 index 정보, 위치, 방위각, 속도 정보 및 rcs (amplitude) 값이 공백 없이 일렬로 저장되어 있음. 원점은 레이더를 마운트한 위치
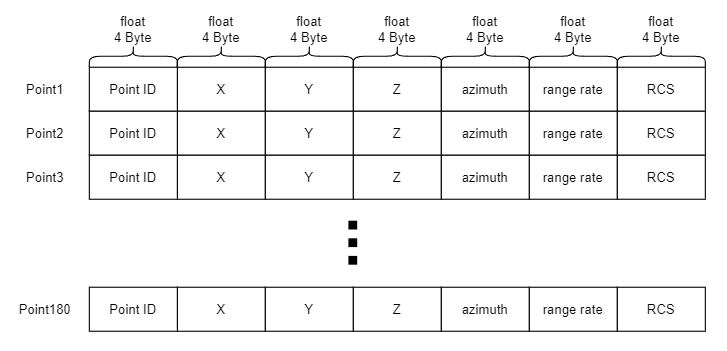
0: point_id
2-4: x, y, z 별 위치
5: azimuth
6: range rate
7 : rcs
파이썬 사용자의 경우, numpy 의 fromfile 을 통해서 아래와 같이 float32 변수로 load가 가능함
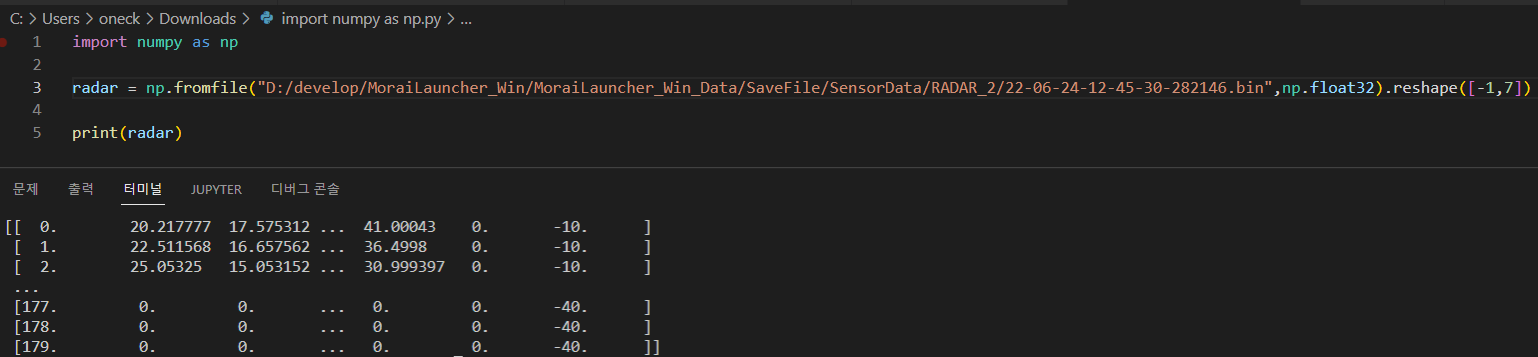
저장 위치는 SaveFile/SensorData/RADAR_* 이며, 파일 이름은 포인트 클라우드를 저장한 날짜와 시간으로 정해짐
