Example Scenarios
Scenario Runner는 OpenSCENARIO 구조에 대한 사용자의 이해를 돕기 위해 다양한 예제 시나리오를 제공한다. 이 페이지에서는 예제 시나리오 파일의 위치 및 각 시나리오 파일의 내용에 대해 설명한다.
목차
시나리오 파일 위치
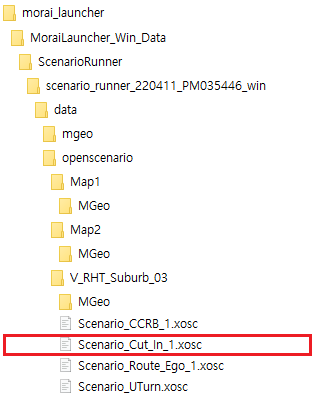
시나리오 파일은 아래의 위치에 제공된다. 시나리오 파일은 시나리오가 실행될 지도를 기준으로 폴더에 분류되며, 각 폴더는 MGeo 양식의 지도 데이터를 포함하고 있다.
${Launcher_folder}\MoraiLauncher_Win_Data\ScenarioRunner\${ScenarioRunner_version}\data\openscenario\${Map_name}\${Scenario_name}.xosc
(예: morai_launcher\MoraiLauncher_Win_Data\ScenarioRunner\scenario_runner_220411_PM035446_win\data\openscenario\V_RHT_Suburb_03\Scenario_Cut_In_1.xosc )
시나리오 파일 내용
시나리오 파일 제목은 해당 시나리오를 표현하는 용어로 정의되어 있으며, 그 뜻은 아래와 같다.
(Scenario Runner의 버전 및 사용자 권한에 따라 다른 예제 시나리오가 제공된다)
OpenSCENARIO 양식에는 없지만 Scenario Runner에서 기능을 제공하는 예제에는 (*)로 표시하였다.
Scenario Title | Description |
|---|---|
Animal | 지정된 위치에 동물을 배치한다. |
CBNAO (Car-to-Bicyclist Nearside Adult Obstructed) | EGO 차량이 접근할 때 자전거가 가려진 상태에 있다가 갑자기 도로에 진입한다. |
CCRB (Car-to-Car Rear Braking) | 전방 주행 중이던 차량이 갑자기 감속하여 충돌 위험을 유발한다. |
CPNC (Car-to-Pedestrian Nearside Child) | EGO 차량이 접근할 때 보행자가 가려진 상태에 있다가 갑자기 도로에 진입한다. |
Create map object (*) | 지정된 위치에 지형 및 물체를 생성한다. |
Cut in | 옆 차선에서 주행 중이던 차량이 충분한 안전거리를 확보하지 않고 차선을 변경하여 들어온다. |
Double lane change | 전 후방에서 주행 중이던 차량이 동시에 차선 변경을 시도한다. |
Double lane changer | 후방에서 주행하던 차량이 추월 후 연속하여 차선 변경을 시도한다. |
Fault (*) | 대상 차량에 특정 기능 고장을 일으킨다. |
NPC ACC (Auto-cruise control) | NPC 차량이 주변 환경에 따라 주행할지 결정한다. 비활성화 할 경우 초기에 지정된 경로와 속도로 주행한다. |
NPC Check TL (Traffic light) (*) | NPC 차량이 신호에 따라 주행할지 결정한다. |
Obstacle | 지정된 위치에 장애물을 배치한다. |
Overtake | 후방에서 주행하던 차량이 EGO 차량을 추월한다. |
Parking (*) | 차량을 전/후방 주차 시키거나 주차 칸에서 도로로 진입한다. |
Pedestrian | 지정된 위치에 보행자를 배치한다. |
Route | EGO 또는 NPC 차량에 경로를 설정하여 지정된 경로대로 주행한다. |
Spawn | 차량 또는 보행자를 지정된 속도로 생성하는 가상의 Spawn 지점을 생성한다. |
Stop sign | 차량이 stop sign에서 정차했다가 다시 주행한다. |
Synchronize intersection | OpenSCENARIO의 Synchronize action을 활용하여 EGO 차량에 맞추어 NPC 차량을 교차로에 동시에 도착시킨다. |
Traffic Light | 지도 내의 신호등을 제어한다. |
UTurn | 지도(MGeo)에 정의된 유턴 경로를 활용하여 유턴을 수행한다. |
© 2022 MORAI Inc.