Sensor Verification Map
: Sensor Verification Map은 환경 변인을 통제한 상태에서 센서 성능 확인을 위한 자동화 테스트 및 Calibration 테스트 할 수 있는 Map이다.
Sensor Verification Map 진입 방법
V_IND_SensorVerificationMap 및 원하는 차량 선택 후 Start
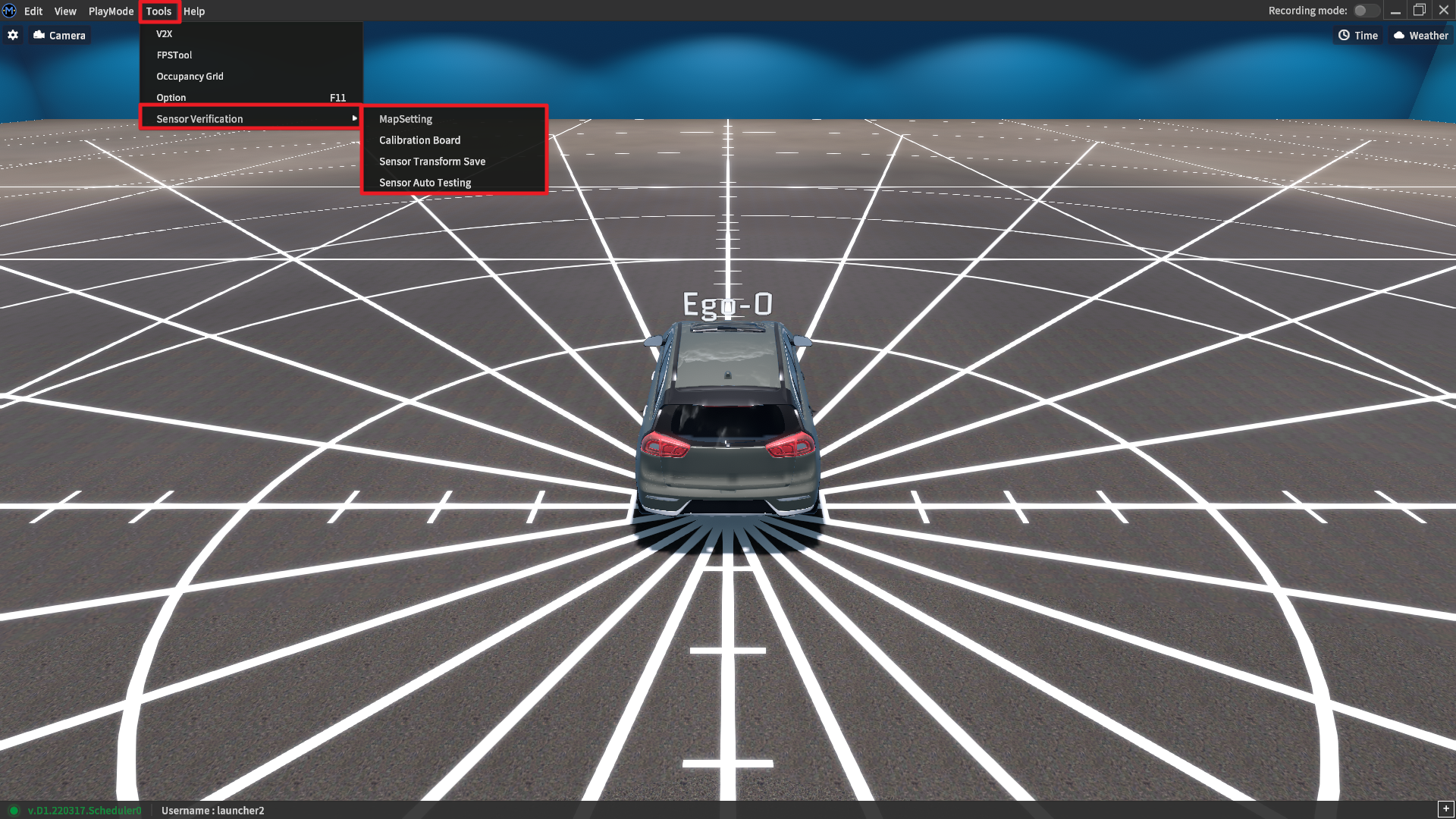
Sensor Verification Map 초기화면 및 Sensor Verification Menu
Sensor Verification Menu
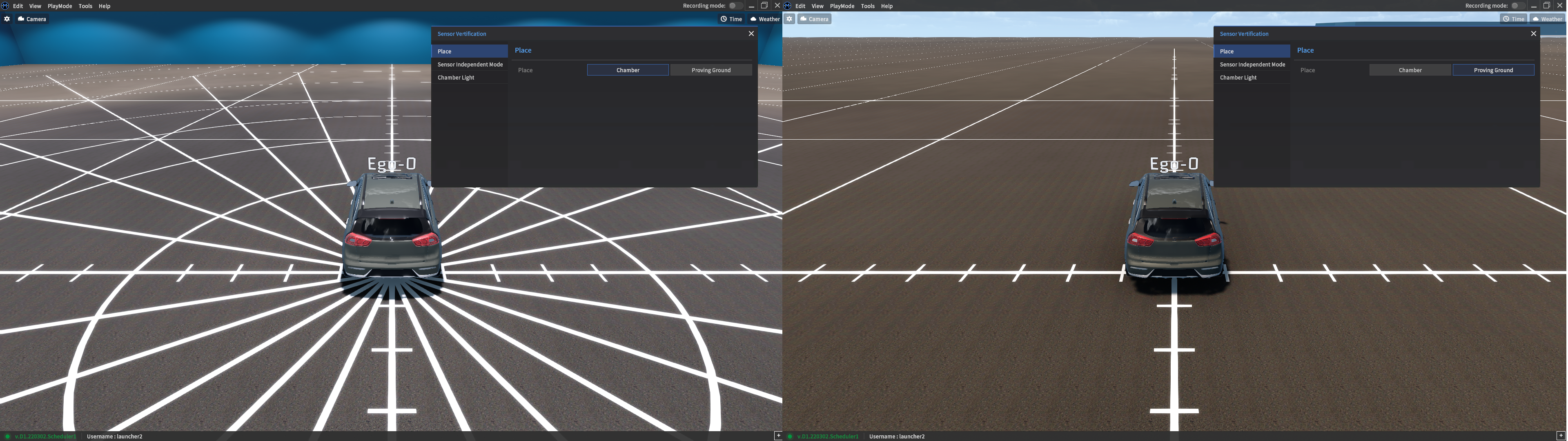
Place
:Ego vehicle의 위치를 특정 위치로 이동 시키는 메뉴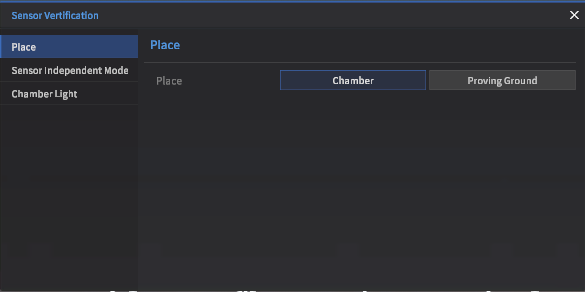
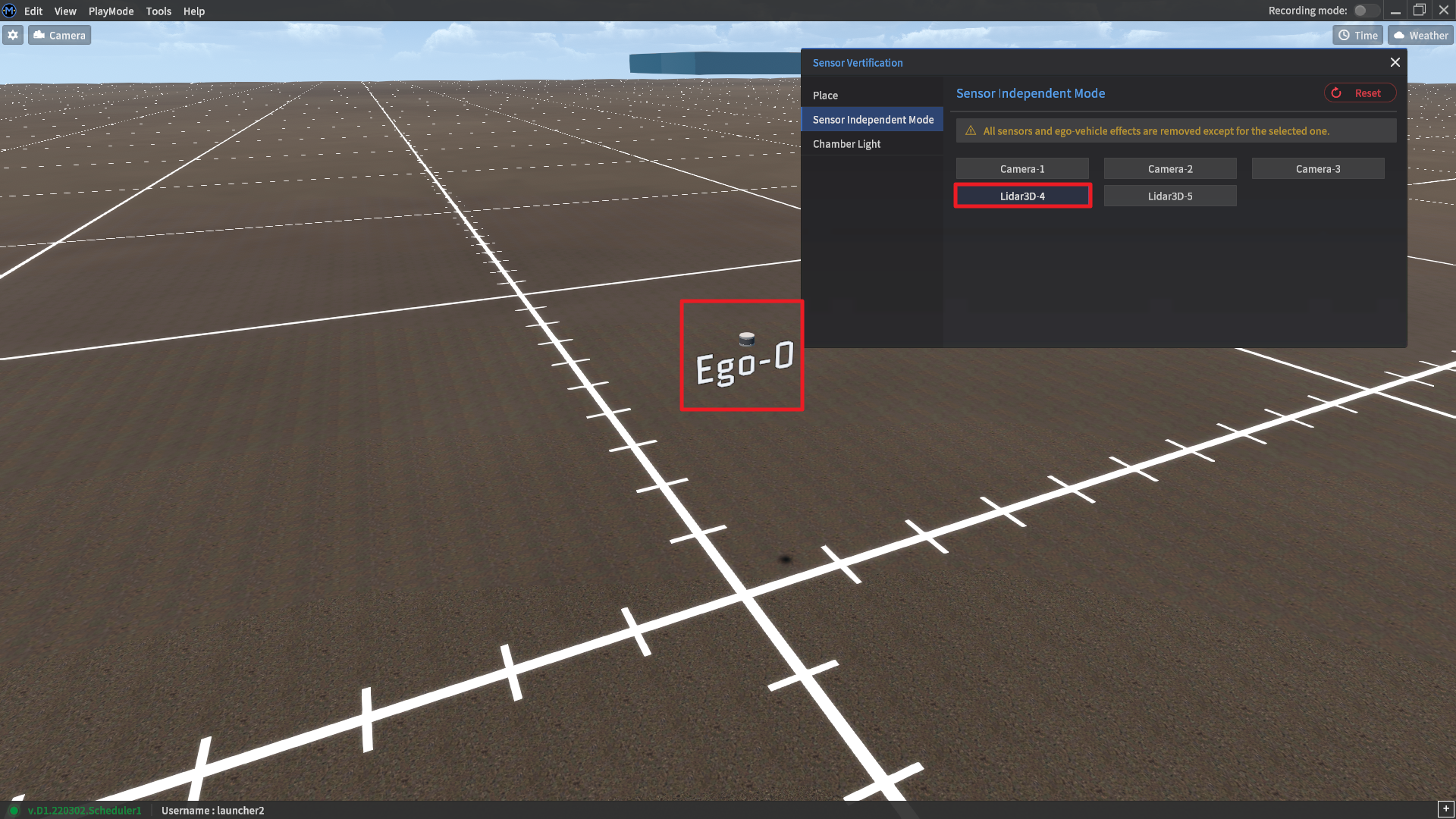
Sensor Independent Mode
:선택한 Sensor를 제외한 나머지 Sensor 및 Ego Vehicle의 영향을 제거하는 메뉴Ego Vehicle에 부착되어있는 Sensor들의 List가 나타나고, 선택 시 다른 Sensor 및 Ego Vehicle의 영향을 제거한다.
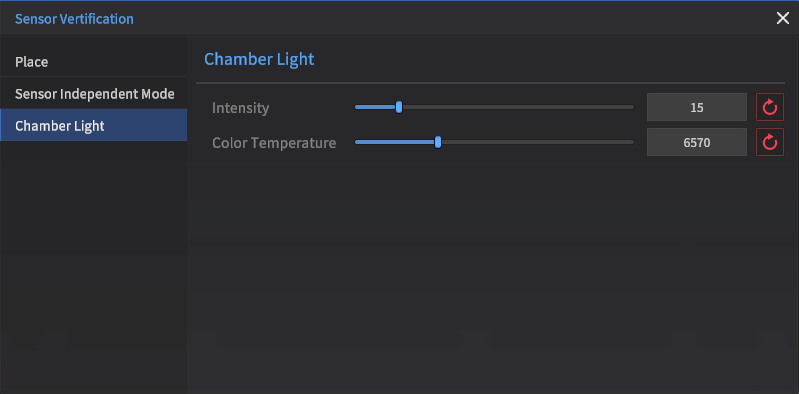
Chamber Light
: Chamber의 조명 Parameter설정 하는 메뉴Intensity : Light 컴포넌트의 Intensity 값을 설정 ( 0 ~ 100)
Color Temperature : Light 컴포넌트의 Color Temperature 값을 설정 (1000 ~ 20000)
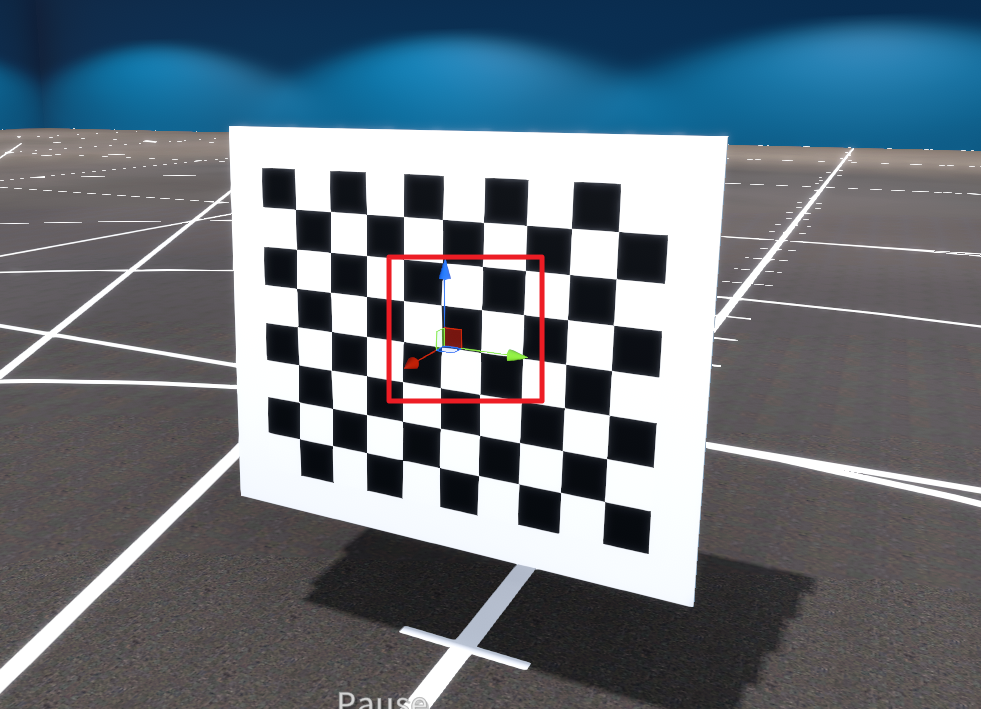
Calibration board를 배치 하는 메뉴
Chessboard 배치
원하는 위치의 바닥면을 Shitf + 클릭하면 해당 바닥면에서 특정 높이(1.5m)에 Chessboard가 배치 됨.
Chessboard 제거
제거하려고 하는 Chessboard를 Alt + 클릭하면 Chessboard가 제거 됨.
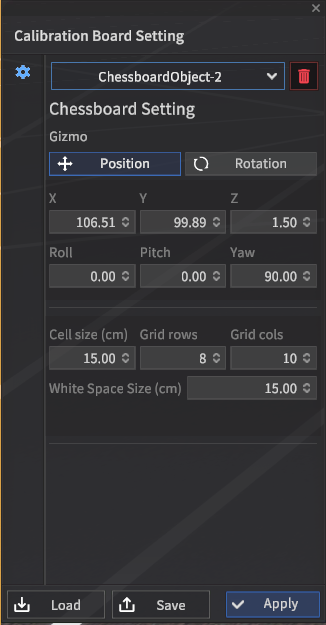
Chessboard Parameter
Gizmo
Gizmo 방식 선택 후 마우스를 이용한 위치 이동 가능
UI setting
Chessboard 선택, 위치 / 자세 , 속성 편집 가능
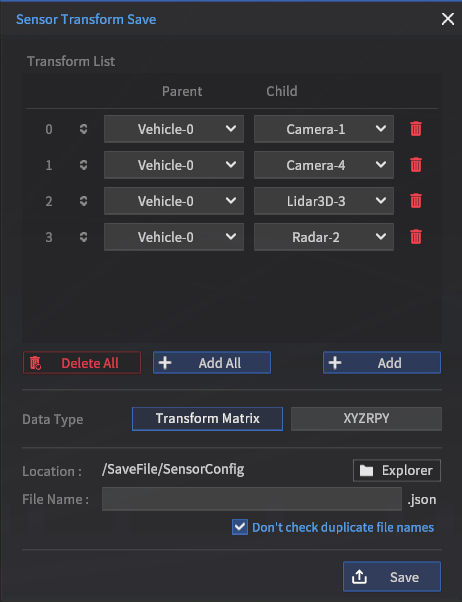
Sensor Transform을 저장하는 메뉴
Transform List
: Sensor의 Transform 정보를 간략하게 표시Add All : Ego Vehicle에 부착되어있는 Sensor Transform 추가
Add : 사용자가 원하는 Sensor만 추가 Transform 추가
Transform Data Type
: 저장되는 데이터 타입 설정Transform Matrix : Parent frame기준 Child frame의 Transformation Matrix
XYZRPY : Parent frame기준 Child frame의 Translation / Rotation
json 파일
File name에 원하는 File명을 입력 후 Save를 클릭하면 Location위치에 .json파일 저장.
.json 파일 형태는 KITTI 참조 (링크 첨부 예정)
기능 미 제공 상태
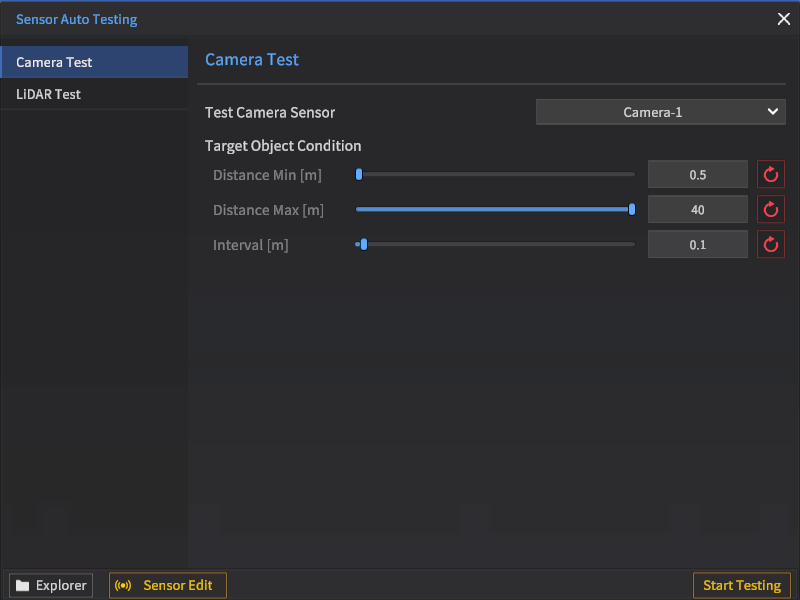
Camera Test
: Camera Auto Test 관련 설정 및 Test 진행Test Camera Sensor
: 현재 Ego Vehicle에 배치된 Camera 센서중 선택 가능Test Object Condition
Distance Min (m) : AutoTest의 Target으로 사용하는 Object와 Sensor 의 거리 Min 값( 0.5 ~ )
Distance Max (m) : AutoTest의 Target으로 사용하는 Object와 Sensor 의 거리 Max 값( ~ 40)
Interval (m) : Object의 거리 간격 (0.01 ~ 5)
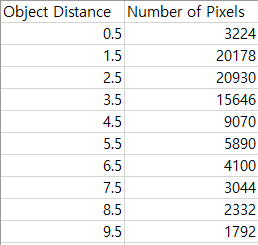
저장되는 데이터
MoraiLaunchr_Data\SaveFile\SensorAutoTesting경로에 저장.
Test 결과 CSV File에는 Object Distance, Number of Pixels 저장
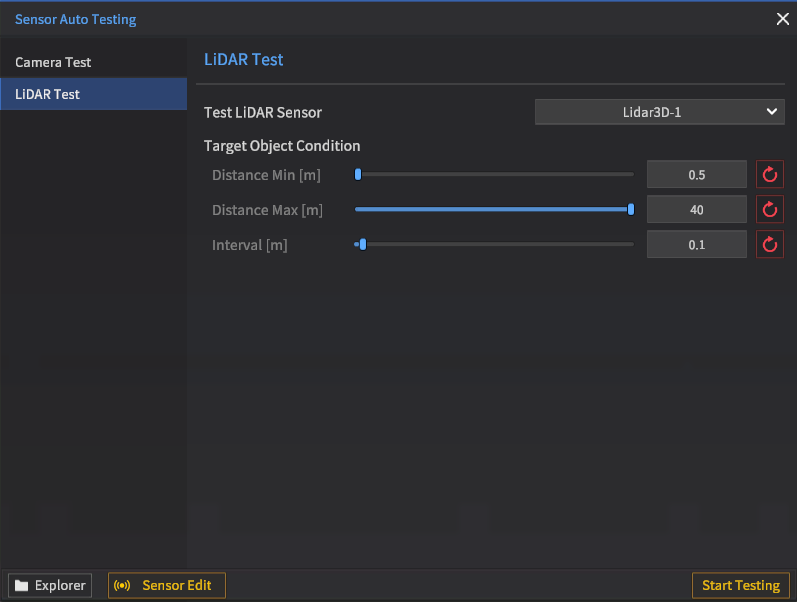
LiDAR Test
: Camera Auto Test 관련 설정 및 Test 진행Test LiDAR Sensor
: 현재 Ego Vehicle에 배치된 LiDAR 센서중 선택 가능Test Object Condition
Distance Min (m) : AutoTest의 Target으로 사용하는 Object와 Sensor 의 거리 Min 값( 0.5 ~ )
Distance Max (m) : AutoTest의 Target으로 사용하는 Object와 Sensor 의 거리 Max 값( ~ 40)
Interval (m) : Object의 거리 간격 (0.01 ~ 5)
저장되는 데이터
MoraiLaunchr_Data\SaveFile\SensorAutoTesting경로에 저장.
Test 결과 CSV File에는 Object Distance, Number of Points 저장