네트워크 설정 UI
본 섹션에서는 네트워크 설정 UI와 시뮬레이터에서 지원하는 통신 별 설정 방법을 설명한다.
Network Settings
시뮬레이터에서 네트워크 통신을 구성하려면 상단 메뉴에서 Edit > Network Settings 를 클릭한다.
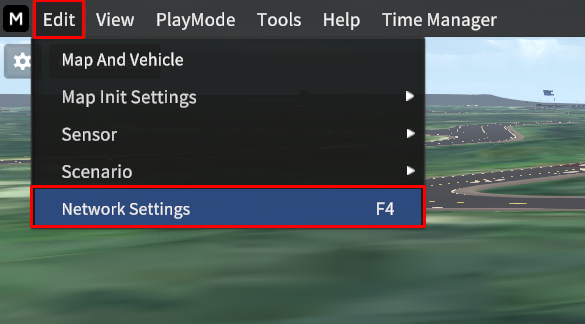
Network Settings 는 아래와 같이 Ego Network 와 Simulator Network 설정으로 구성되며 각 메뉴마다 지원되는 통신 대상, 통신 종류에 맞추어 IP/Port Frame Rate 등의 통신 파라미터를 설정한다.
모든 항목 설정 설정을 마치면 창 하단의 Connect 를 클릭한다.
Ego Network
Network Settings 에서 Ego Network 는 Ego 차량에 종속적인 네트워크이다.
Cmd Control
Publish, Subscriber, Service
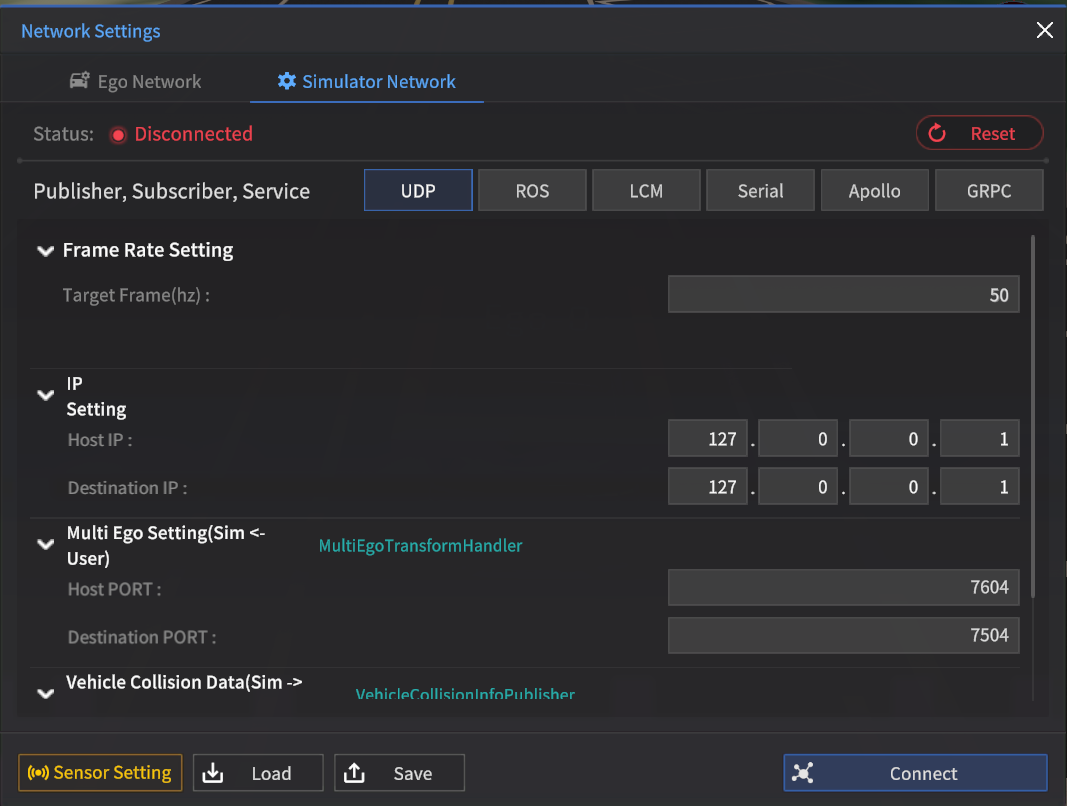
Simulator Network
Network Settings 에서 Simulator Network 는 시뮬레이터 자체에만 연결하는 네트워크이다.
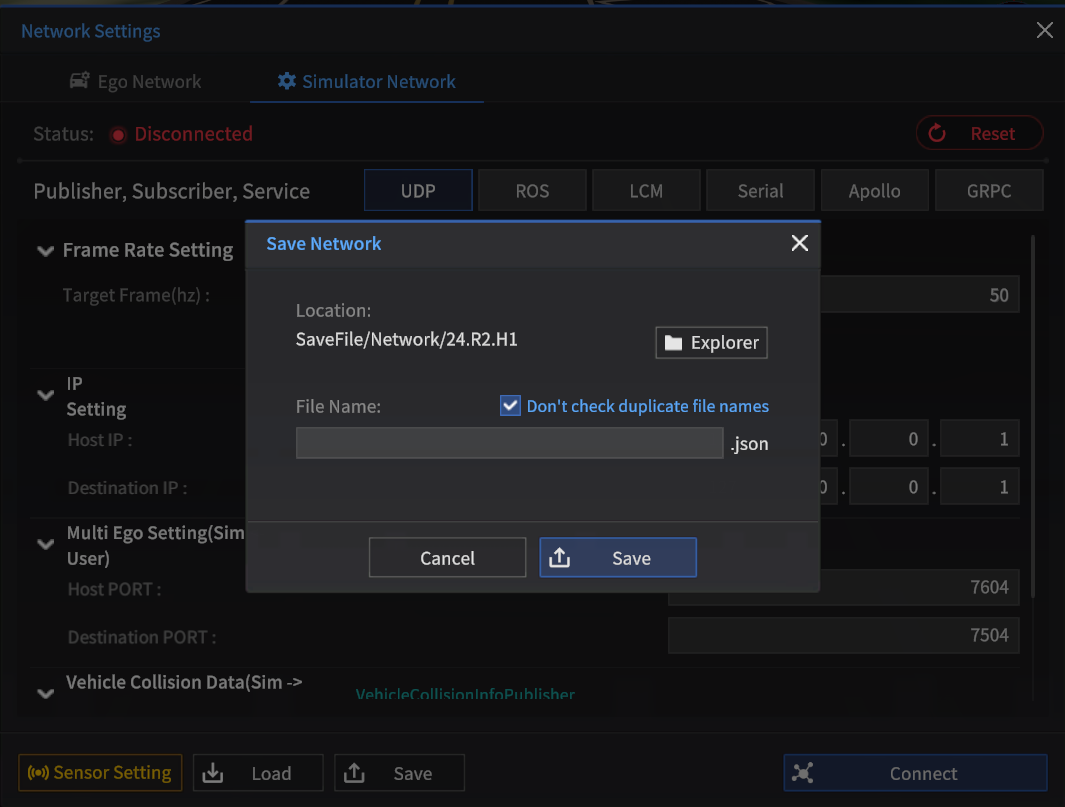
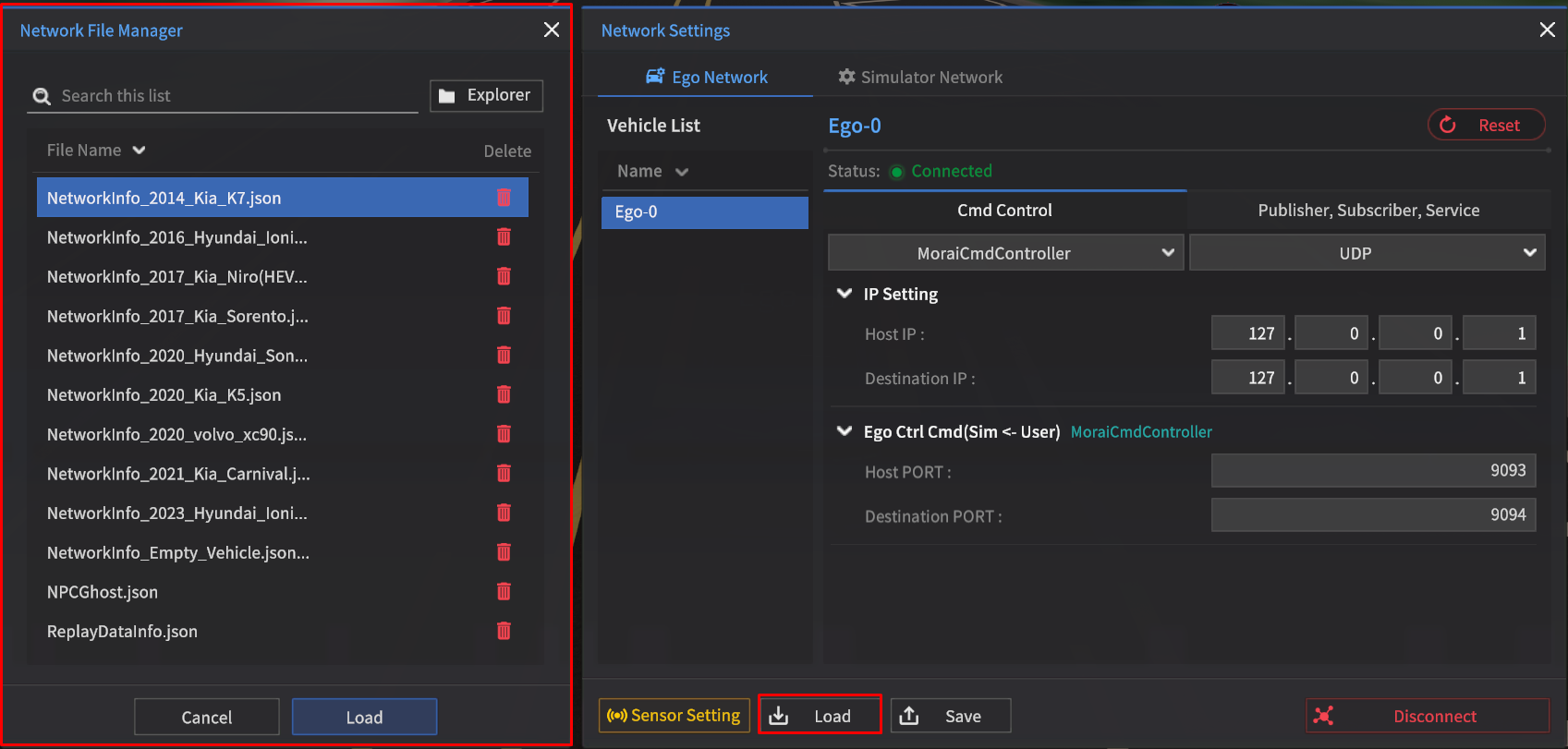
네트워크 설정 저장 & 불러오기
Save Network 를 이용하여 현재의 네트워크 설정 정보를 저장할 수 있다.
저장된 네트워크 설정 정보는 Network File Manager 에 표시되며, 설정 정보를 Load 를 통해 불러오거나, 휴지통 버튼을 누르면 삭제할 수 있다.
통신 별 네트워크 설정
Network Settings 에서 지원하는 통신에 따른 설정 방법을 설명한다.
ROS 통신
ROS 메시지 파일 다운로드
개발용 Linux 환경에 직접 다운로드 가능하도록 아래 GitHub 링크를 제공한다.
$ git clone https://github.com/MORAI-Autonomous/MORAI-ROS_morai_msgs.git
ROS 네트워크 설정
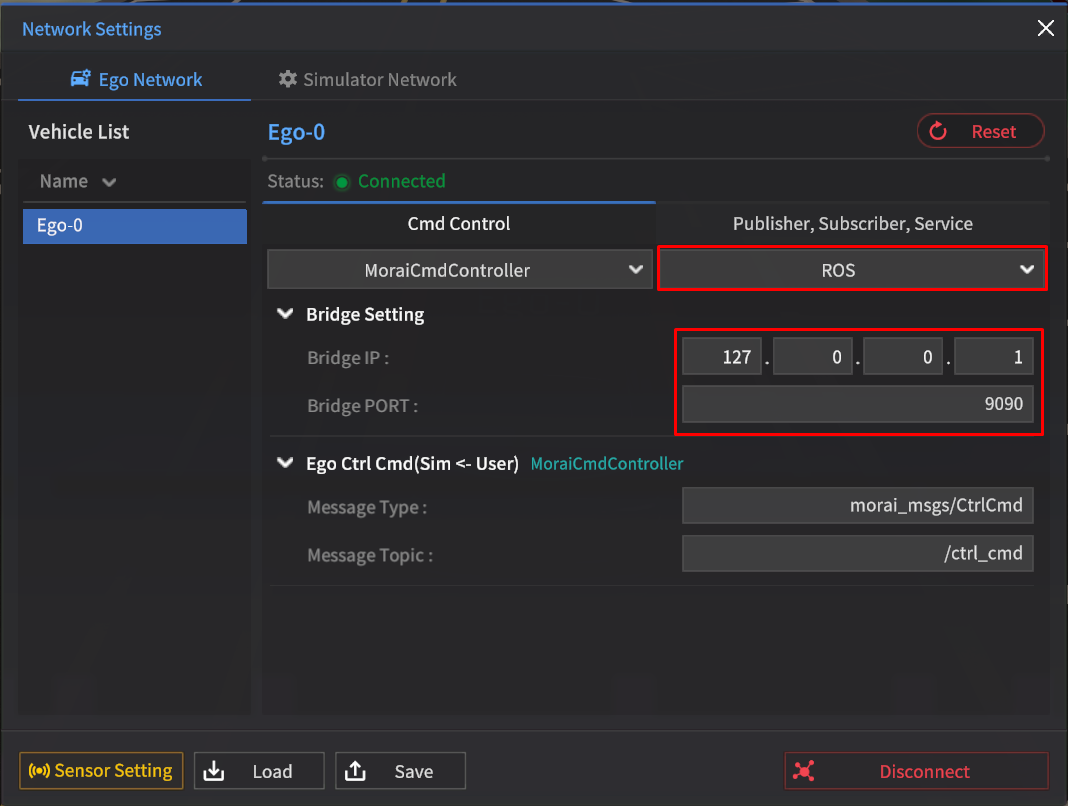
ROS 통신 주기, ROS Bridge 서버 등 통신을 위한 주요 정보를 입력한다.
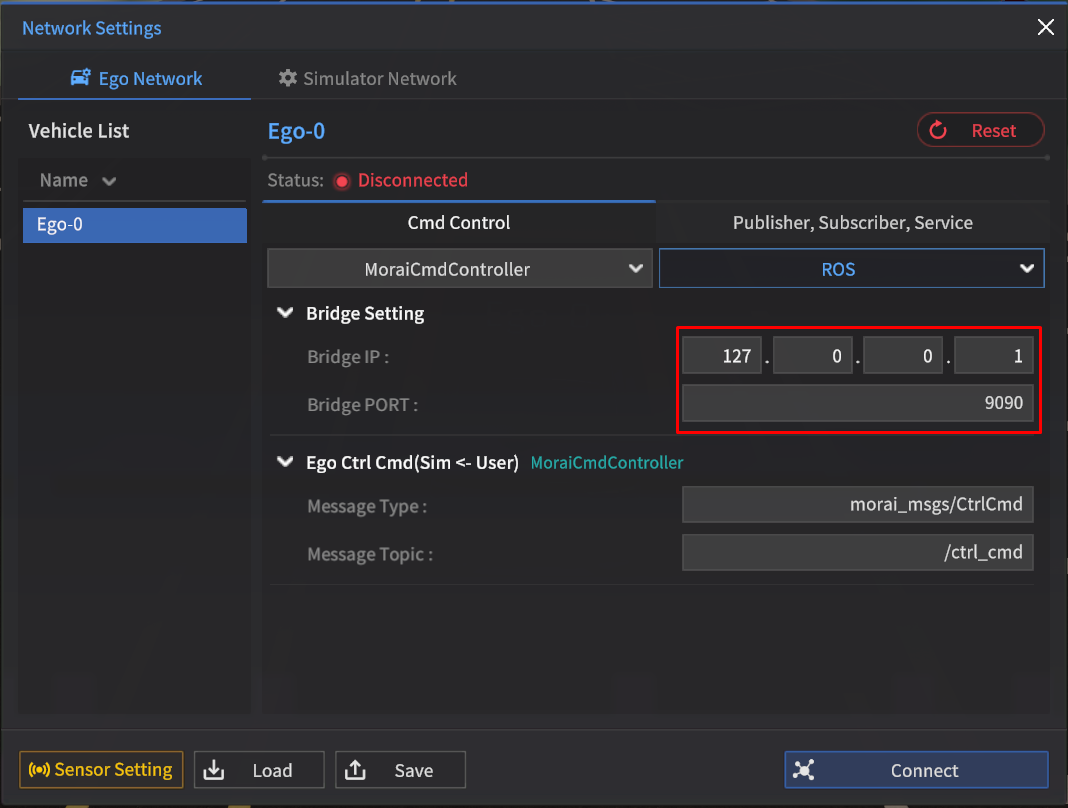
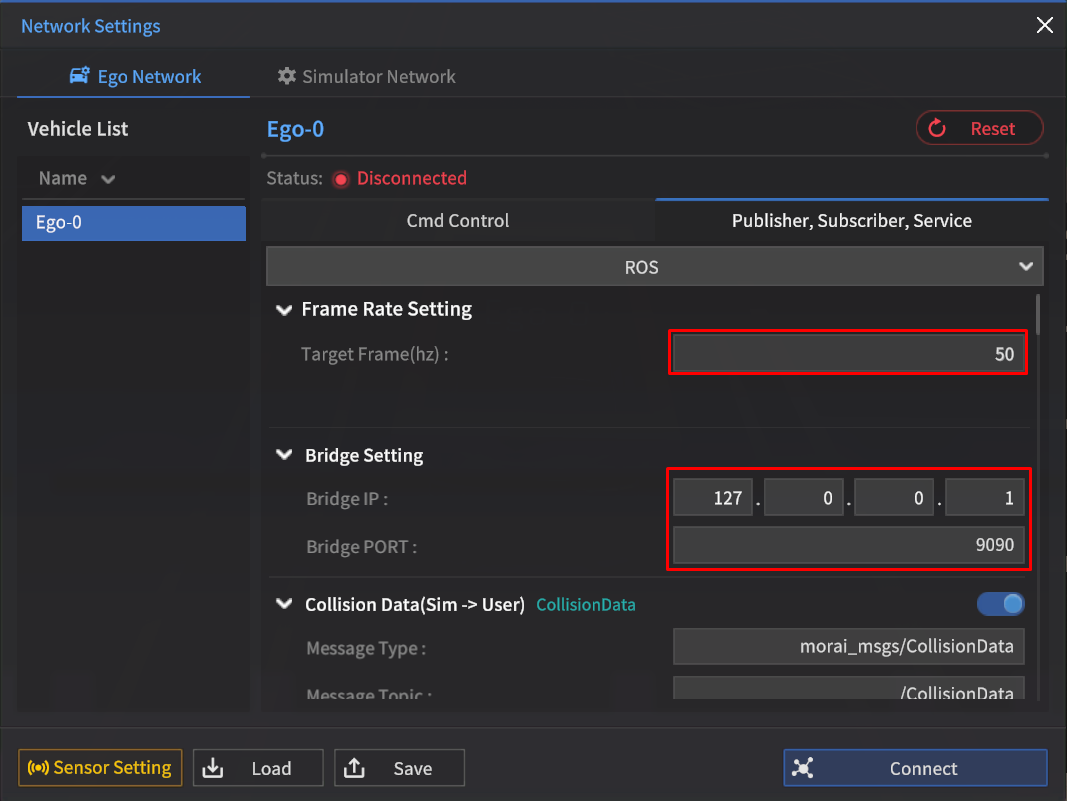
Bridge Setting
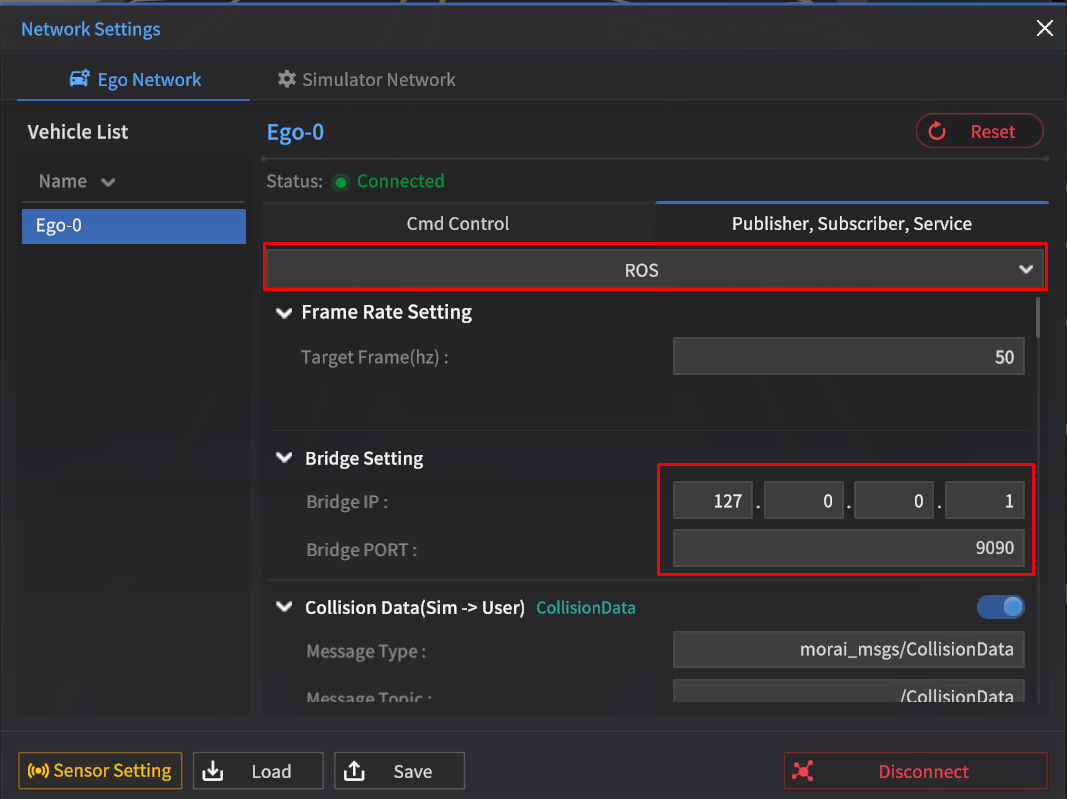
ROS Bridge 의 IP 와 Port 번호를 입력한다.
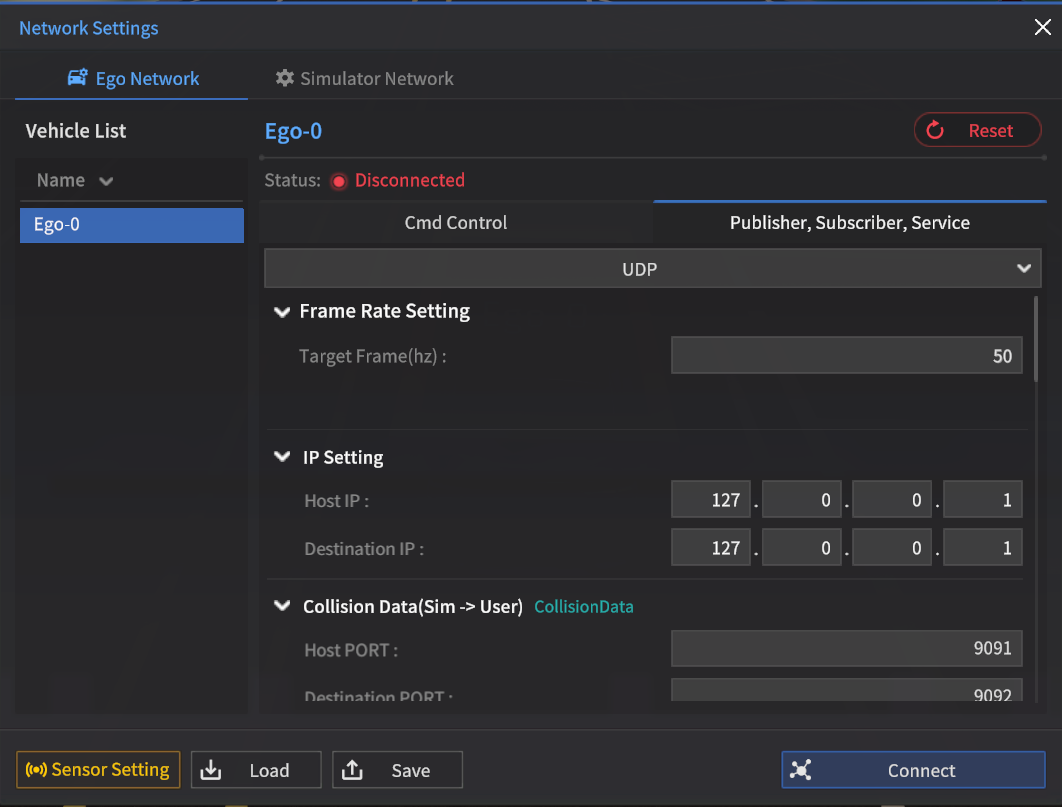
Frame Rate Setting
ROS 출력 메세지의 Frame Hz 를 지정한다. (최대 120 Hz)
시뮬레이터의 FPS 에 따라 목표 FPS보다 낮게 전송될 수 있음
ROS 메시지 설정
Ego Network 와 Simulator Network 에서 주고받는 메시지 타입과 토픽을 설정한다.
Ego Network 메시지 설정 예시
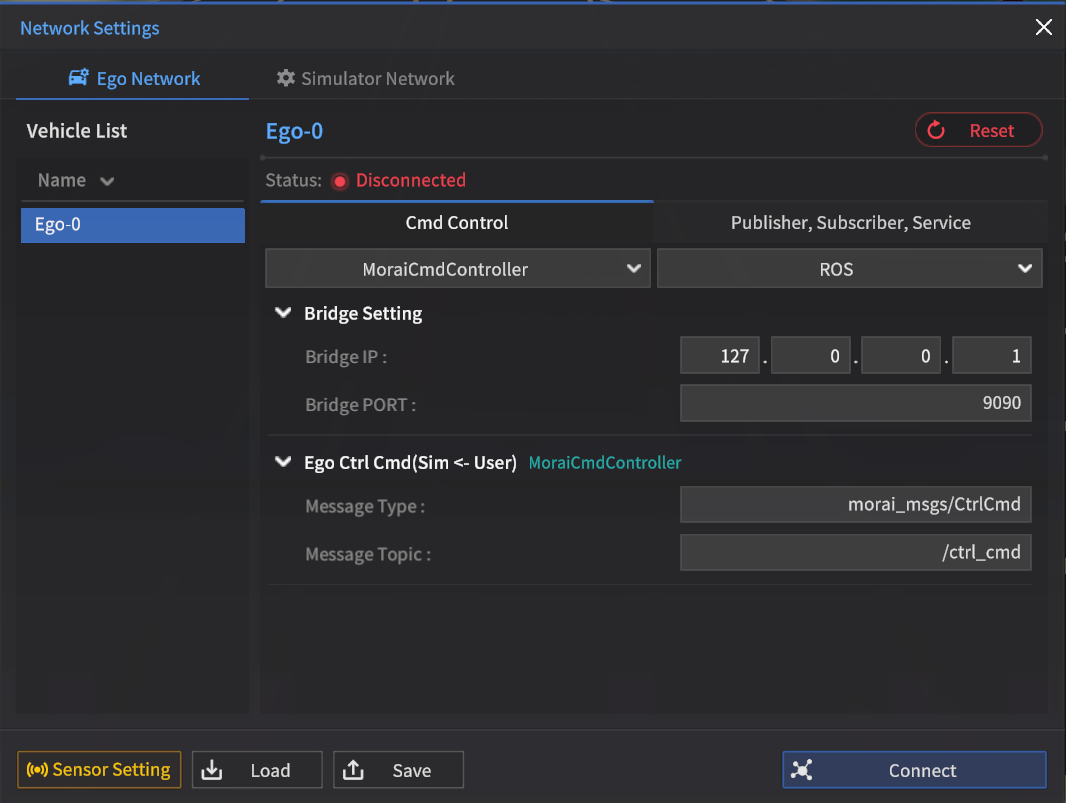
Cmd Control
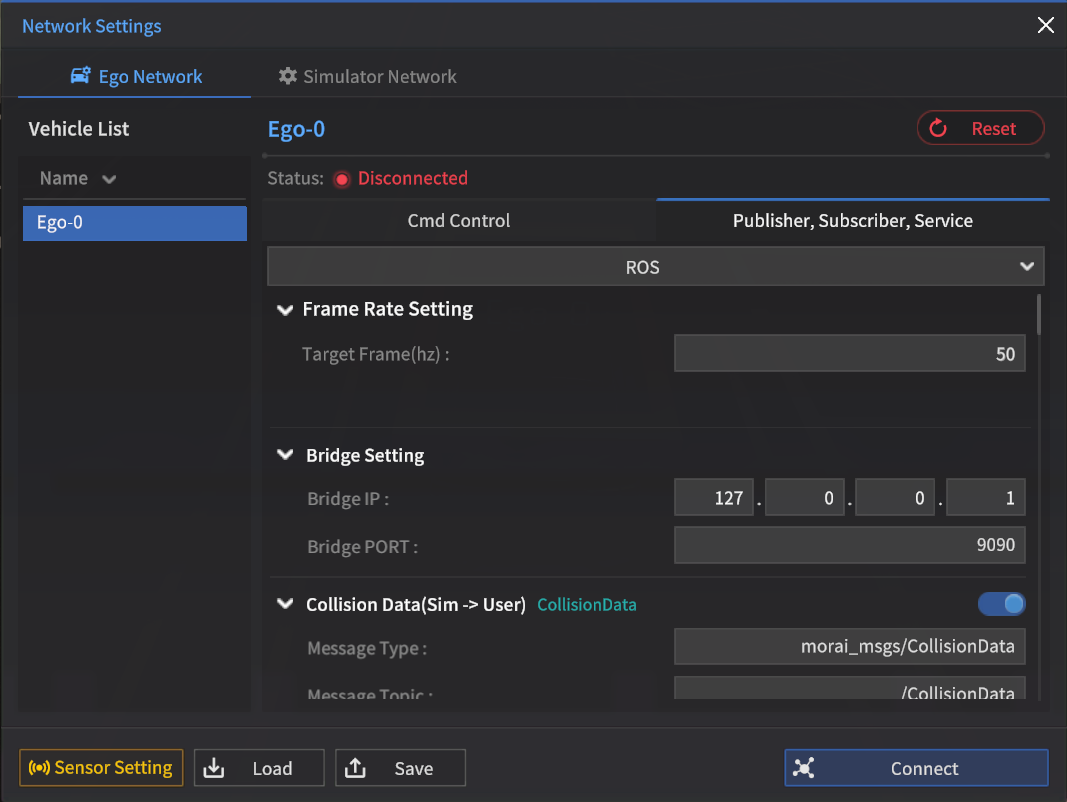
Publisher, Subscriber, Service
UDP 통신
IP 설정
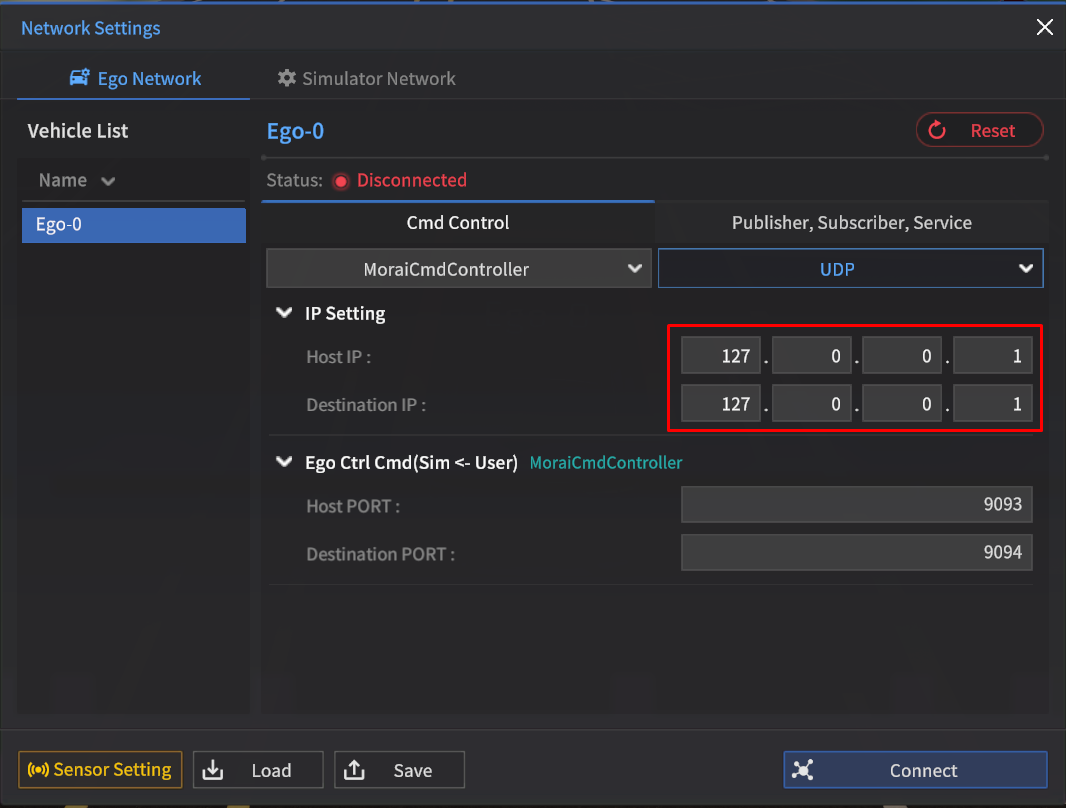
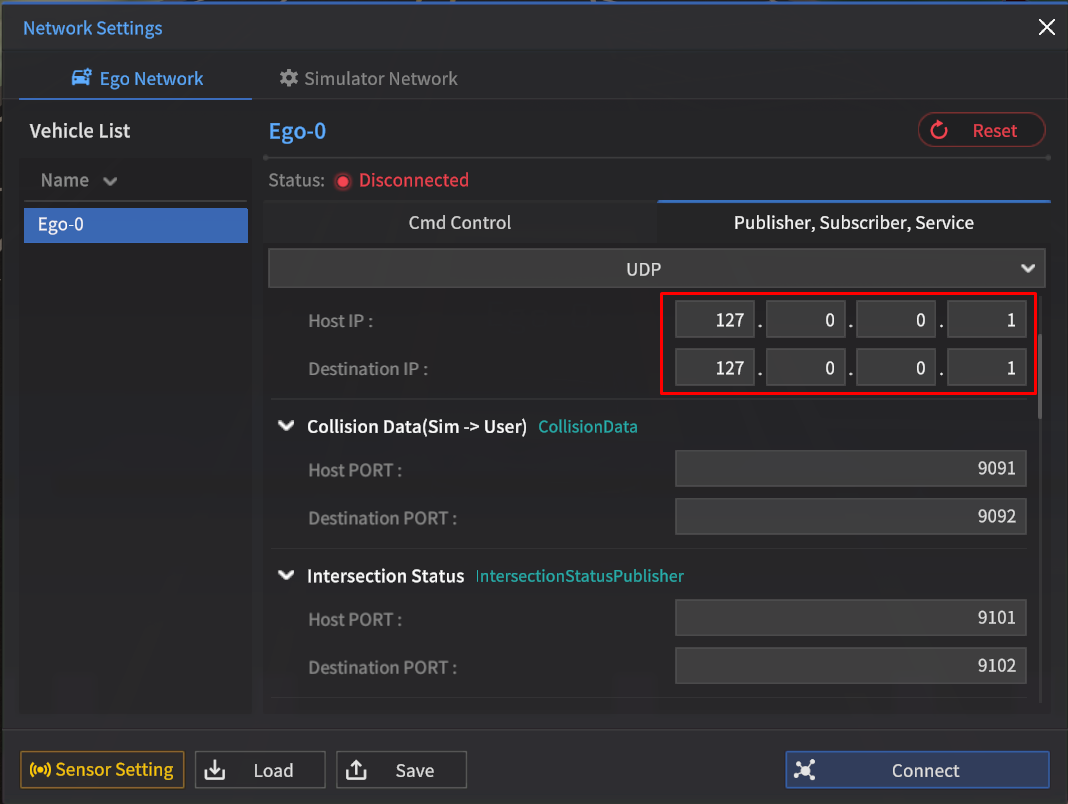
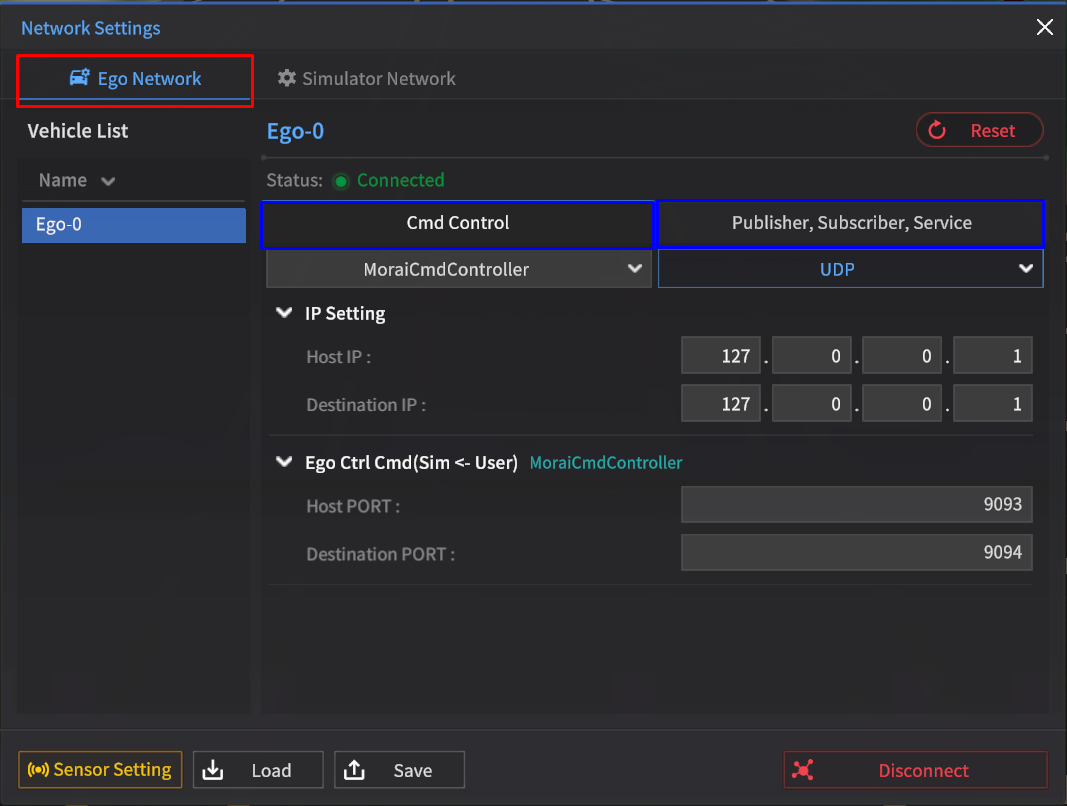
IP Setting
시뮬레이터 PC에는 Host IP, 사용자 알고리즘 PC에는 Destination IP 입력
사진과 같이 하나의 PC에서 모두 사용할 경우 다음과 같이 127.0.0.1 입력
사용할 포트 입력 (포트 중복 주의)
UDP 메시지 설정
Ego Network 와 Simulator Network 에서 시뮬레이터와 주고받는 UDP 메시지 별 Host/Destination PORT 설정
Ego Network 메시지 설정 예시
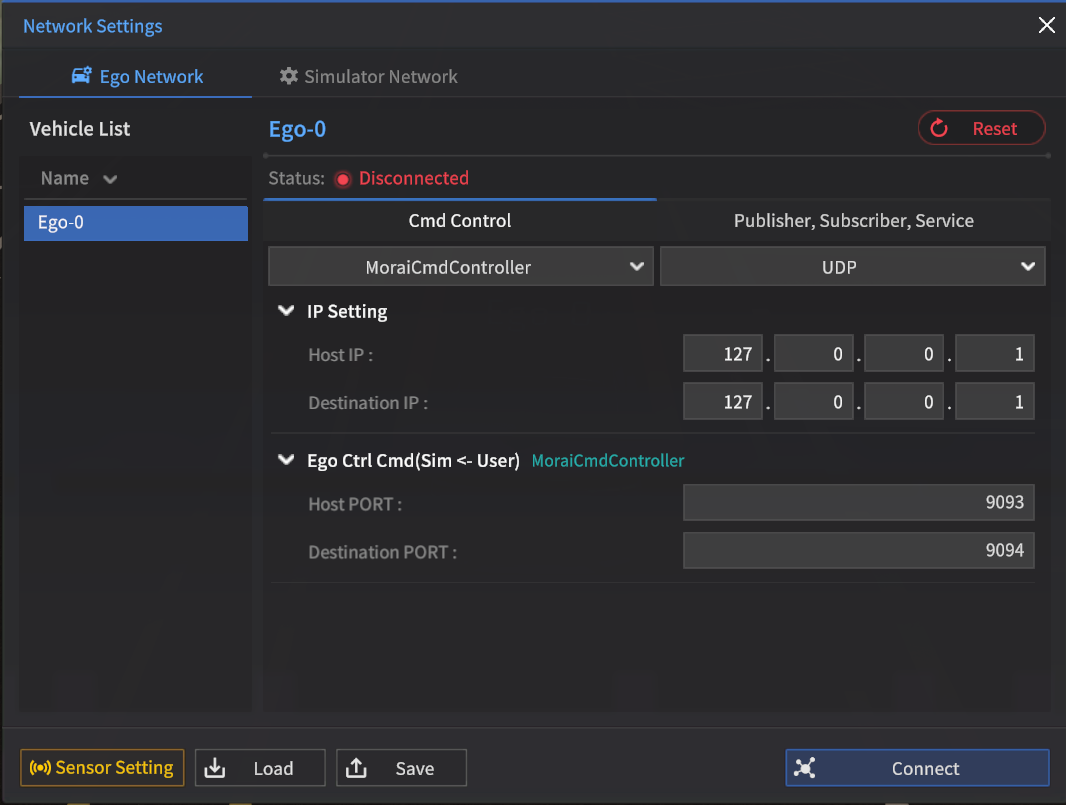
Cmd Control
Publisher, Subscriber, Service
gRPC 통신
Network Settings > Simulator Network 에서 gRPC 서버의 연결 여부와 포트를 설정한다.
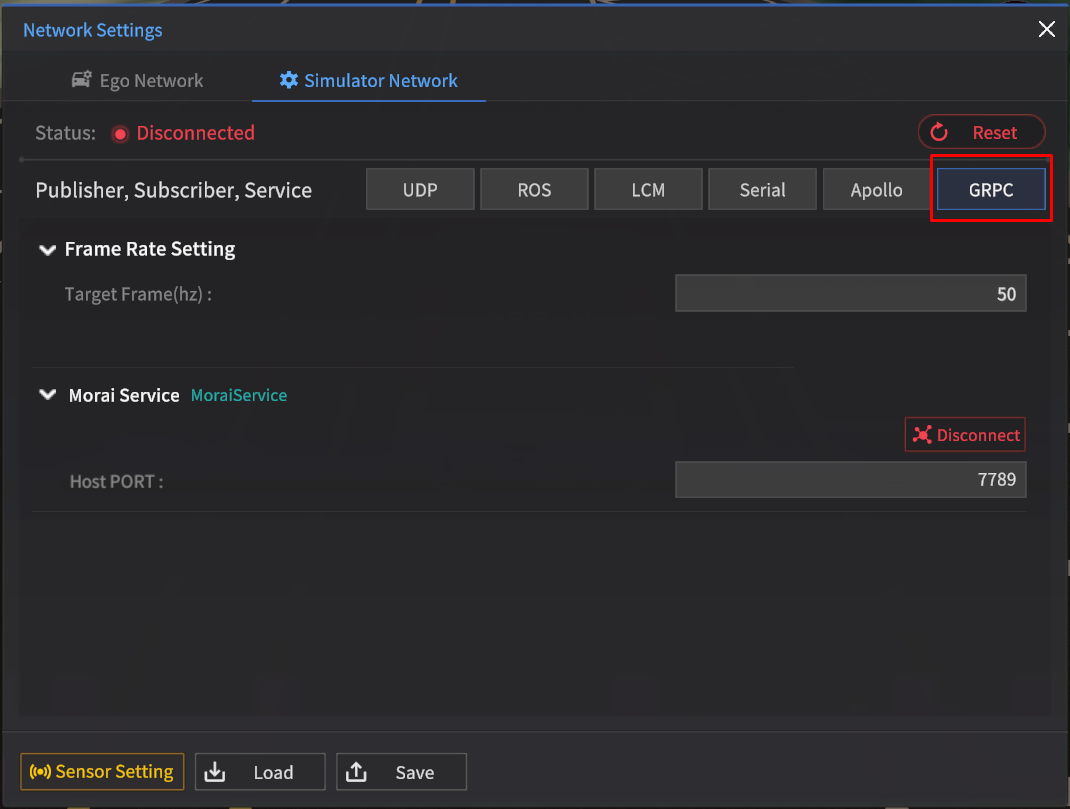
Frame Rate Setting
N/A
Morai Service
시나리오 러너 등 MORAI SIM 과 연동을 위한 MORAI SIM 의 기본 gRPC 서버로, 포트의 기본값은 7789이며 Disconnect 후 설정을 변경할 수 있다.
Network List
본 섹션에는 Network List 에서 현재 시뮬레이터에 연결되어 있는 Network 의 상태를 확인하는 방법을 설명한다.
상단메뉴의 View > Network List 를 클릭하면 현재 Network List 를 확인 할 수 있다.

Network List 확인
Ego Network
Cmd Controller, Publisher, Subscriber, Service, Sensor 로 구분된다.
Cmd Controller : Ego 차량의 제어 메세지 Network 를 표시한다.
Publish (Sim → User) : 시뮬레이터에서 발신 하는 메세지 Network 연결 정보를 표시한다.
Subscriber (User → Sim) : 시뮬레이터에서 수신 하는 메세지 Network 연결 정보를 표시한다.
Service : 시뮬레이터의 Service 메세지 연결 정보를 표시한다.
Sensor : 장착 되어있는 Sensor 의 Network 연결 정보를 표시한다.
Simulator Network
Publisher, Subscriber, Provider 로 구분된다.
Network List 창 Total 을 통해 배치되어 있는 모든 Network 의 숫자를 알 수 있다.
Search 를 통해 원하는 Network 를 찾을 수 있다.
네트워크 연결 방법: 각 통신 별 설정 방법 참고
