Occupancy Grid Map
본 페이지는 감지되는 물체를 일정한 크기의 공간의 Cell 단위로 나누어 표현한 지도인 Occupancy Grid Map 사용 방법에 대해 설명한다.
Occupancy Grid Map 사용 방법
Occupancy Grid 생성하기
시뮬레이터 실행 상단의 Tools > Occupancy Grid 를 클릭한다.

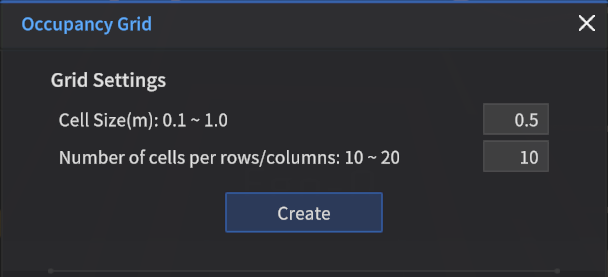
Cell Size, Number of cells per row/column 설정 후 Create 를 클릭한다.
24.R2 버전부터 기존 용어들이 아래와 같이 변경되었다. 24.R2.0 UPDATE
Interval → Cell Size
Size → Number of cells per row/column
Occupancy Grid 구성 요소 (단위: m)
Cell Size : 하나의 Occupancy Grid 간격 크기
범위 값: 0.1 ~ 1
기본 값: 0.5
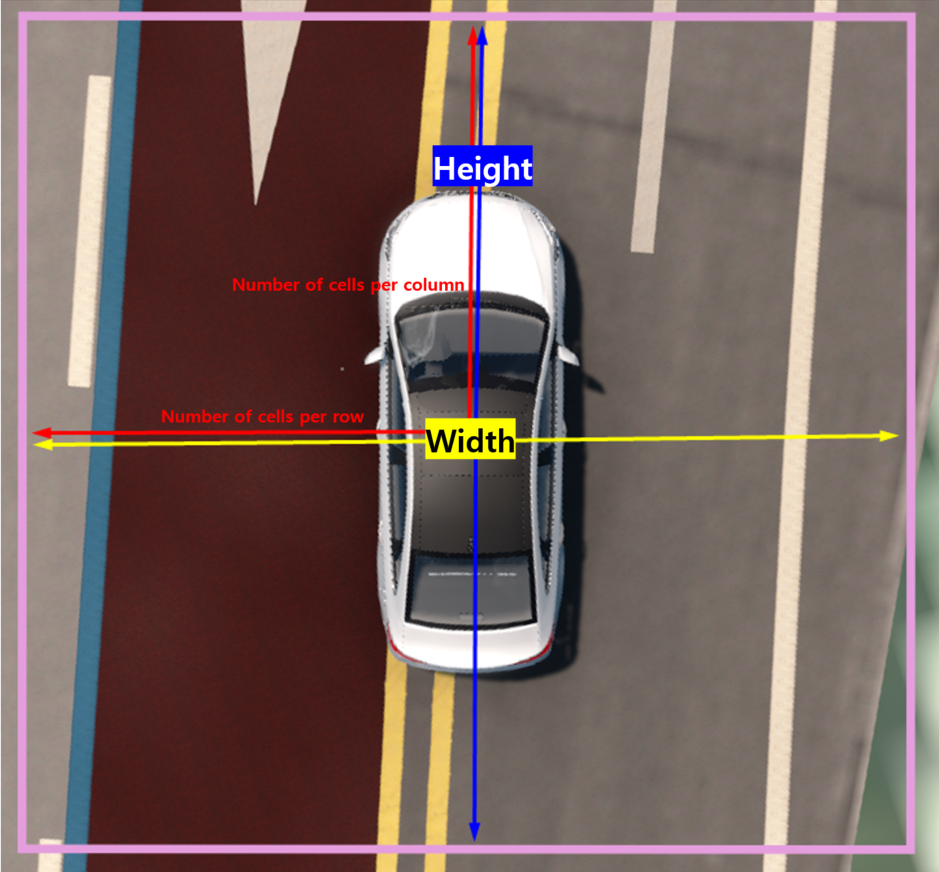
Number of cells per row/column : Ego Vehicle 에서 Occupancy Grid 경계까지 포함되는 Grid 개수
범위 값: 10 ~ 20
기본 값: 10
예: 10으로 설정 시, 가로 세로에 Grid 개수가 20개인 Occupancy Grid Map 생성
차량 주변 Object 가 인지되면 육면체 모양으로 Object 의 위치를 인식한다.

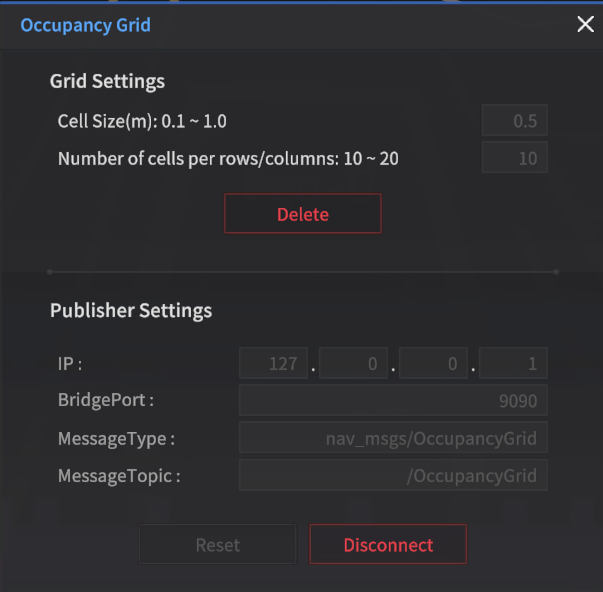
OccupancyGridPublisher
IP 와 Port 번호 세팅
Message Type : nav_msgs/OccupancyGrid
Default Topic : /OccupancyGrid
네트워크 설정 후 Connect 를 클릭하면 ROS 메세지가 Publish 된다.
Occupancy Grid ROS 메세지
Ubuntu ROS 세팅
Ros bridge 실행
$ roslaunch rosbridge_server rosbridge_websocket.launch
RQT 실행
$ rqt
Publish 되는 데이터 rqt 를 통해 확인
int8[] data : Occupancy Grid 의 데이터
사람: 10
차량: 20
인도 및 구조물: 70 24.R2.0 UPDATE
그 외: 100 24.R2.0 UPDATE
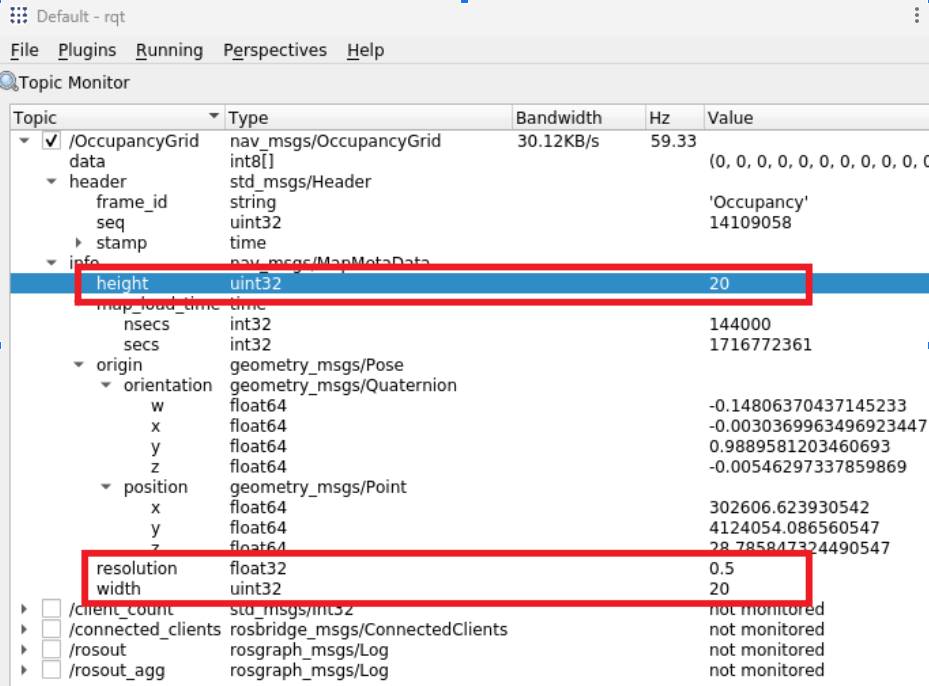
Height 와 Width 의 값은 Number of cells per row/column 값을 2배를 한 것과 같다.
(Height 및 Width 관련해서는 아래 이미지 참고)