Ego Ghost Mode 사용 방법
본 페이지는 User 가 원하는 위치/자세로 Ego Vehicle 을 생성 할 수 있는 모드인 Ego Ghost Mode 에 대해 소개한다.
ROS Protocol Messages
https://github.com/MORAI-Autonomous/MORAI-ROS_morai_msgs/blob/master/msg/GhostMessage.msg
Ghost Ctrl Cmd
Ghost Mode Ego 차량 제어 명령
Message Type : morai_msgs/GhostMessage
Default Topic : /ghost_ctrl_cmd
타입 설명 : Ghost Mode 이용 Ego 차량을 제어하기 위한 메세지
Ghost Mode : 차량을 원하는 위치에 생성 할 수 있는 모드이다.
No | Name | Type | Unit | Remarks |
|---|---|---|---|---|
1 | position | m | ego 차량의 위치 지정 (X, Y, Z) | |
2 | rotation | deg | ego 차량의 회전 지정 (roll, pitch, yaw) | |
3 | velocity | float64 | km/h | ego 차량의 속도 |
4 | steering_angle | float64 | deg | ego 차량 앞바퀴 조향 각도 |
Ego Ghost Mode 기능 사용법
Edit > Network Settings 의 Cmd Control에서 MoraiGhostCmdController 를 선택하여 Ego Ghost Mode 설정 가능함
사용 환경에 맞게 IP 를 적어주고 Connect 함
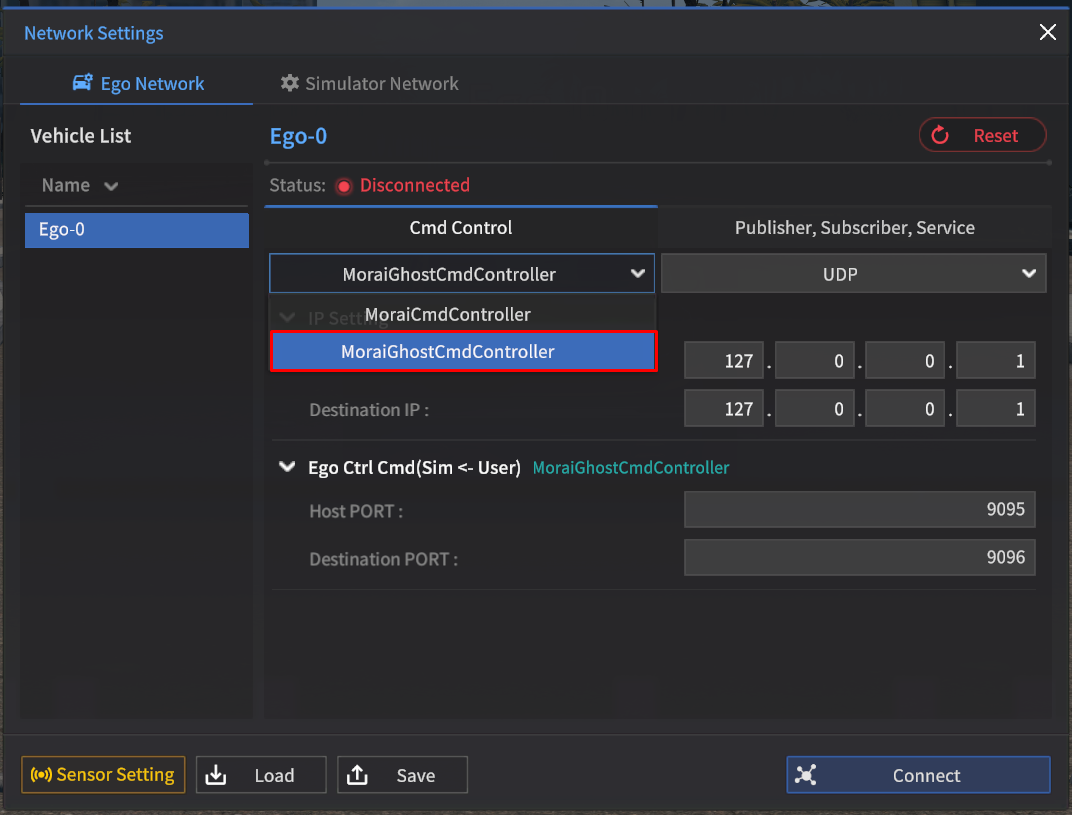
Network Setting
ROS 에서 /ghost_ctrl_cmd _Topic 을 Publish 함
Publish 후 터미널
키보드 키
Q를 누르면 Publish 한 정보에 따라 Ego Ghost Vehicle 이 생성되는 것 확인 가능함
키보드 Q 키를 누른 후 Ego Vehicle 의 모습
UDP Protocol Messages
Ghost Ctrl Cmd
타입 설명 : Ghost Mode 이용 Ego 차량을 제어하기 위한 메세지
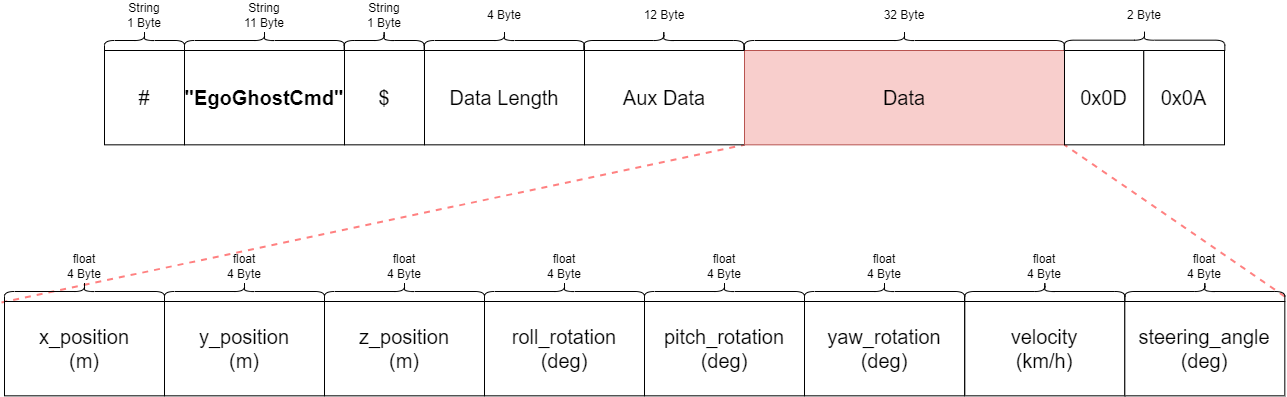
통신 프로토콜
전체 패킷 크기: 63 Bytes
데이터 크기 32 Bytes
x_position (4byte / float)
ego 차량의 x 위치 지정 (m)
y_position (4byte / float)
ego 차량의 y 위치 지정 (m)
z_position (4byte / float)
ego 차량의 z 위치 지정 (m)
roll_rotation (4byte / float)
ego 차량의 roll 회전 지정 (deg)
pitch_rotation (4byte / float)
ego 차량의 pitch 회전 지정 (deg)
yaw_rotation (4byte / float)
ego 차량의 yaw 회전 지정 (deg)
velocity (4byte / float)
ego 차량의 속도 (Km/h)
steering_angle (4byte / float)
ego 차량 앞바퀴 조향 각도 (deg)
Ego Ghost Mode 기능 사용법
UDP에서 Ego Ghost Mode 기능 사용을 위해 아래 GitHub 링크를 제공한다. 24.R1.0 UPDATE
: [UDP] Ego Ghost Mode 기능 사용을 위한 Github 링크
python EGO_Ghost_Mode.py로 실행하여 Ego Ghost Mode 기능을 사용한다.