[AutoWare.AI] 환경 구성 및 테스트
Ubuntu 설치 이후의 AutoWare.AI 의 환경 구성 밑 테스트 과정을 아래와 같이 설명한다. (Virtual box 환경에서 실행 불가)
환경 구성하기
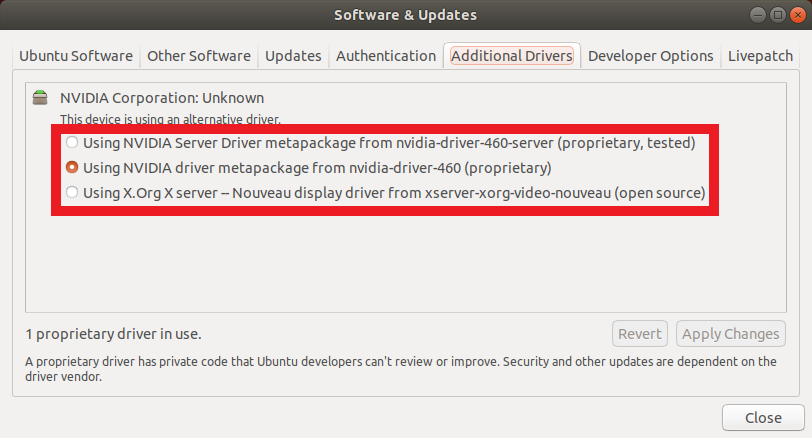
그래픽 드라이버
Nouveau 드라이버가 아닌 NVIDIA 드라이버를 활성화 한다.
Docker 설치
Install Docker CE
Docker 설치를 위한 작업으로 자세한 내용은 아래 링크를 참고한다.
$ sudo apt-get update
$ sudo apt-get install apt-transport-https ca-certificates curl software-properties-common
$ curl -fsSL https://download.docker.com/linux/ubuntu/gpg | sudo apt-key add -
$ sudo apt-key fingerprint 0EBFCD88
$ sudo add-apt-repository "deb [arch=amd64] https://download.docker.com/linux/ubuntu $(lsb_release -cs) stable"
$ sudo apt-get update
$ sudo apt-get install docker-ce
Nvidia Docker 설치
Docker 를 이용한 가상 환경에서 그래픽 카드 사용을 위해 설치해야 한다.
$ distribution=$(. /etc/os-release;echo $ID$VERSION_ID) && curl -s -L https://nvidia.github.io/nvidia-docker/gpgkey | sudo apt-key add - && curl -s -L https://nvidia.github.io/nvidia-docker/$distribution/nvidia-docker.list | sudo tee /etc/apt/sources.list.d/nvidia-docker.list
$ sudo apt-get update
$ sudo apt-get install -y nvidia-docker2
$ sudo pkill -SIGHUP dockerd
$ sudo usermod -a -G docker $USER
$ sudo service docker restart
AutoWare 다운
# Autoware 설치
$ cd ~ && git clone https://gitlab.com/autowarefoundation/autoware.ai/docker.git
# MORAI 공유 폴더 설치
$ git clone https://gitlab.com/gusto94/shared_dir.gitMORAI 공유 폴더 설치 시 share_dir 폴더를 생성한다.
MORAI SIM Network 설정
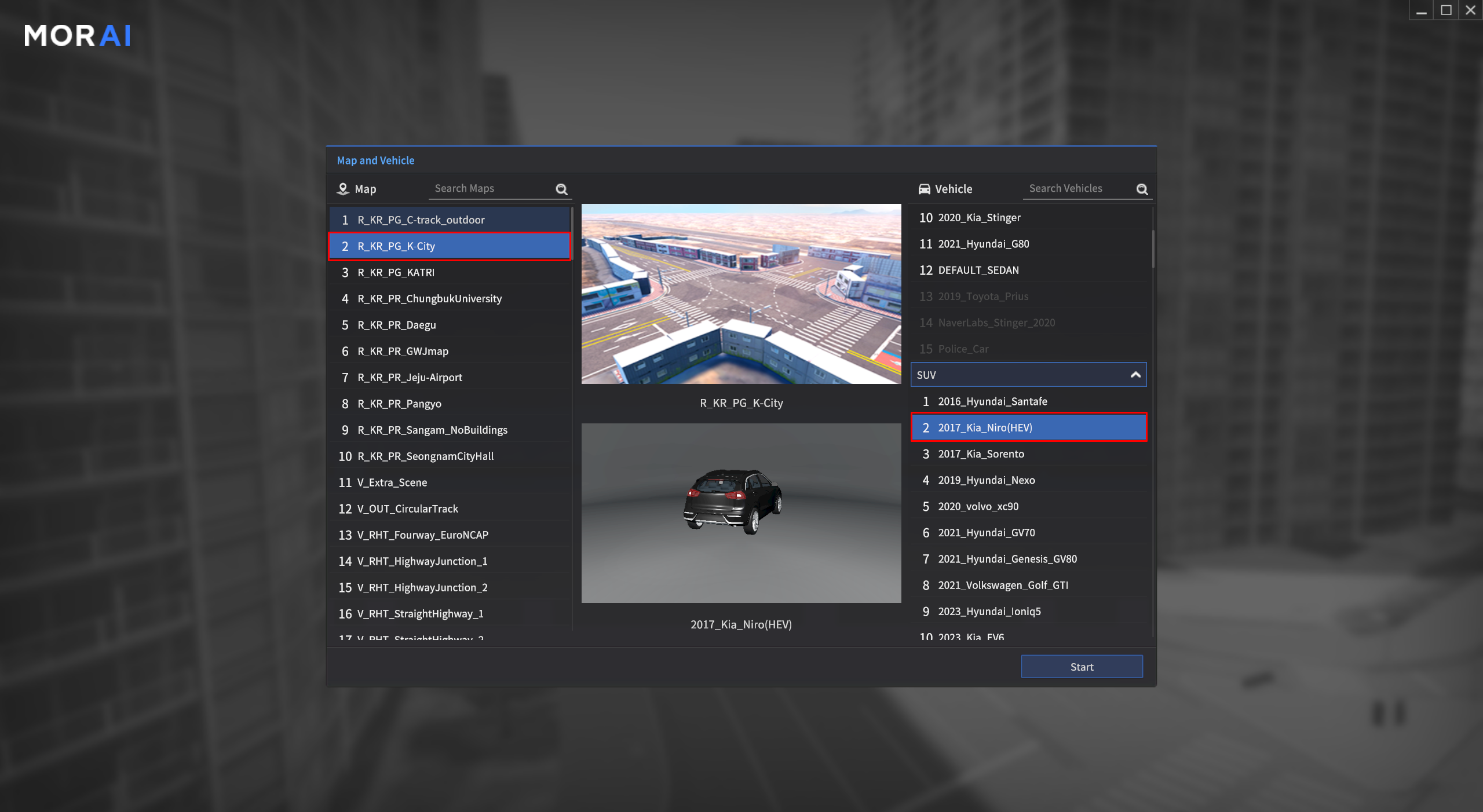
AutoWare 테스트는 R_KR_PG_K-City 맵에서 진행한다.
차량은 원하는 차량을 선택하여 Start 를 클릭하여 진행한다.
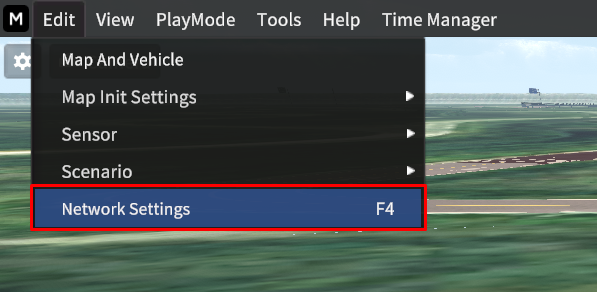
네트워크 세팅
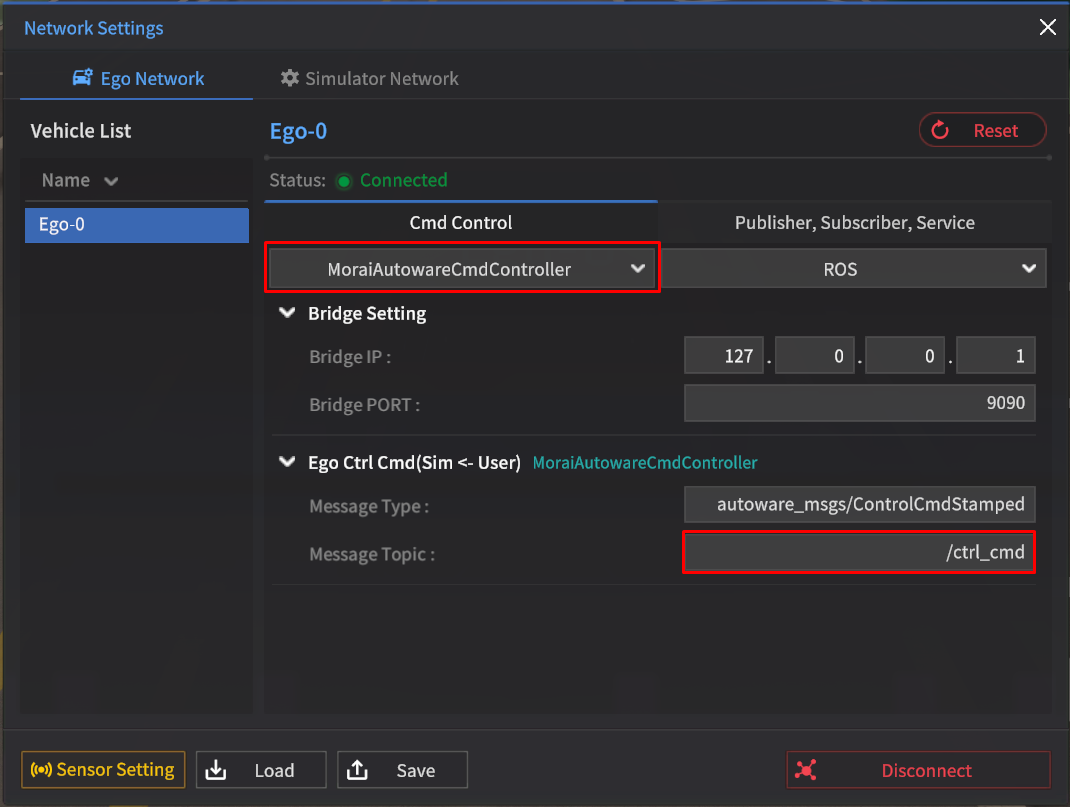
시뮬레이터 상단 메뉴 Edit > Network settings 로 이동한다.
아래 빨간색 박스로 표시한 부분의 토픽의 이름을 변경하고, 나머지는 변경하지 않고 유지한다.
Ego Ctrl Cmd (Sim ← User)
Message Type : autoware_msgs/ControlCmdStamped
Default Topic : /autoctrl_cmd → /ctrl_cmd
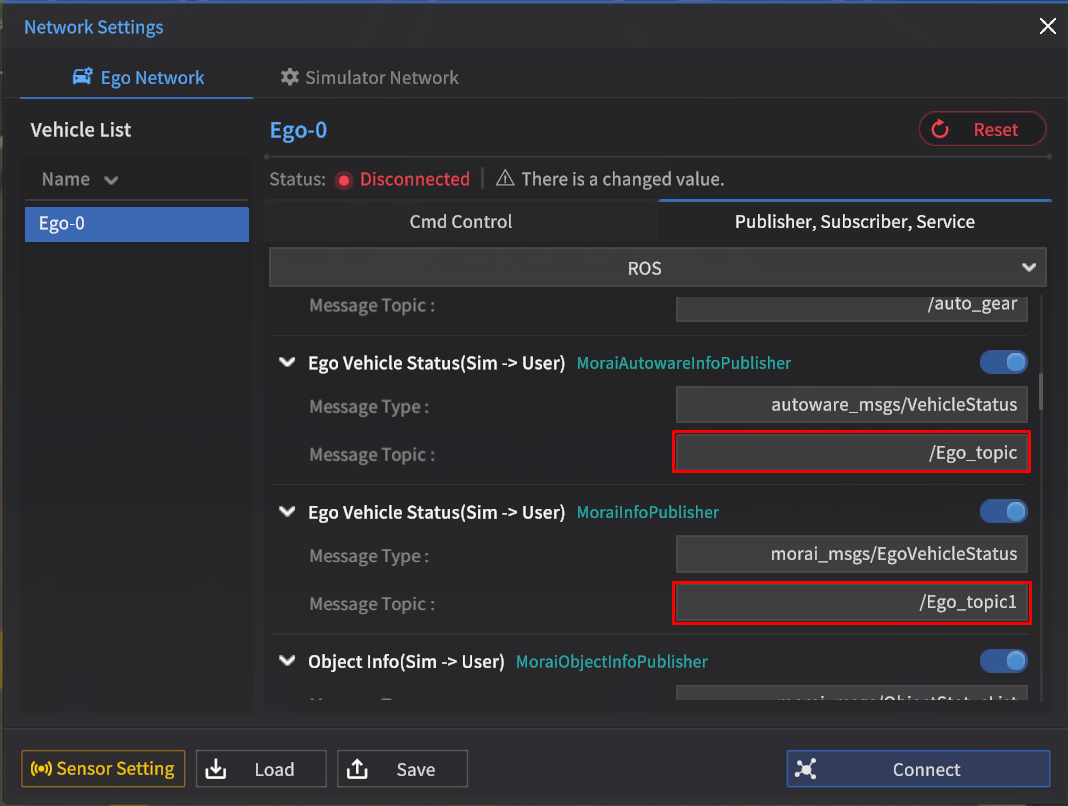
Ego Vehicle Status (Sim → User)
Message Type : autoware_msgs/VehicleStatus
Default Topic : /Ego_topic1 → /Ego_topic
Ego Vehicle Status (Sim → User)
Message Type : morai_msgs/EgoVehicleStatus
Default Topic : /Ego_topic → /Ego_topic1
MORAI SIM Sensor 설정
Sensor 세팅
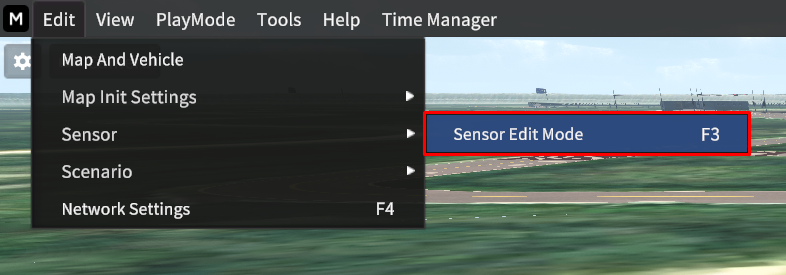
시뮬레이터 상단 메뉴 Edit > Sensor - Sensor Edit Mode 로 이동한다.
좌측의 Sensor list 에서 배치하려고 하는 센서를 선택하고
shift + 마우스 좌 클릭을 이용해서 차량에 배치한다.
각 센서의 세부 세팅은 아래를 참고한다.
Camera, GPS, IMU 센서는 ROS 통신 프로토콜을 사용한다.
LiDAR 센서는 UDP 통신 프로토콜을 사용하며, 원하는 LiDAR 모델을 선택해서 사용한다.
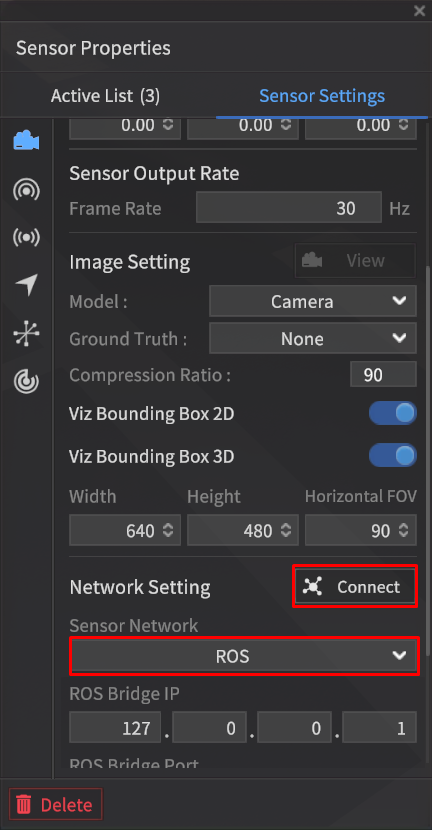
Camera 세팅
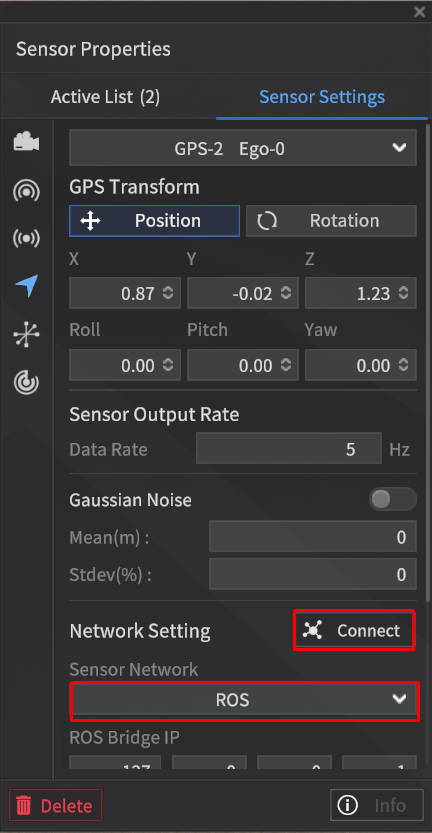
GPS 세팅
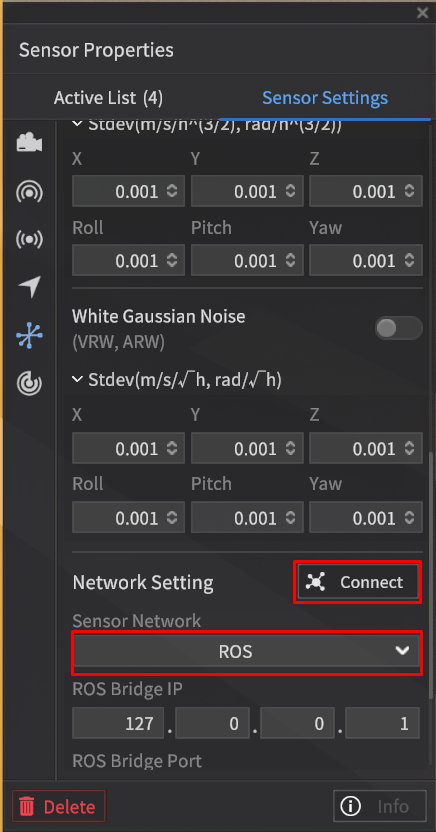
IMU 세팅
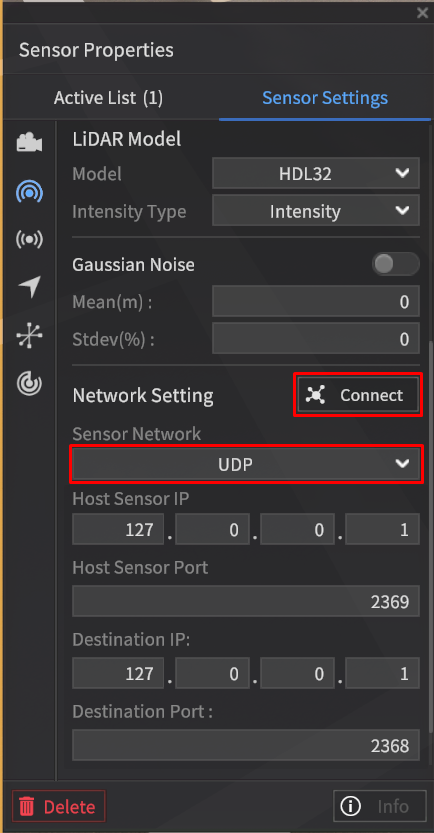
LiDAR 세팅
AutoWare 실행
가상 환경 실행
$ sudo docker/generic/run.sh -s -i oveflow/autoware -t 2.0.5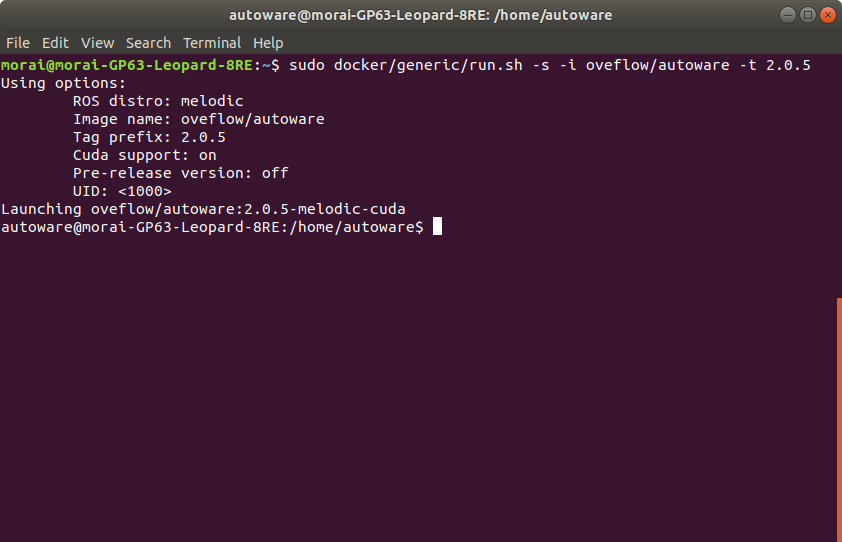
Terminator 실행
입력 창을 한눈에 보기 위해서 Terminator 창을 사용한다.
Terminator 창에서 아래 명령어를 입력
$ terminator명령어를 입력해 terminator 터미널 창 생성$ roslaunch rosbridge_server rosbridge_websocket.launch$ roslaunch gps2utm morai_bridge.launch$ roslaunch runtime_manager runtime_manager.launch
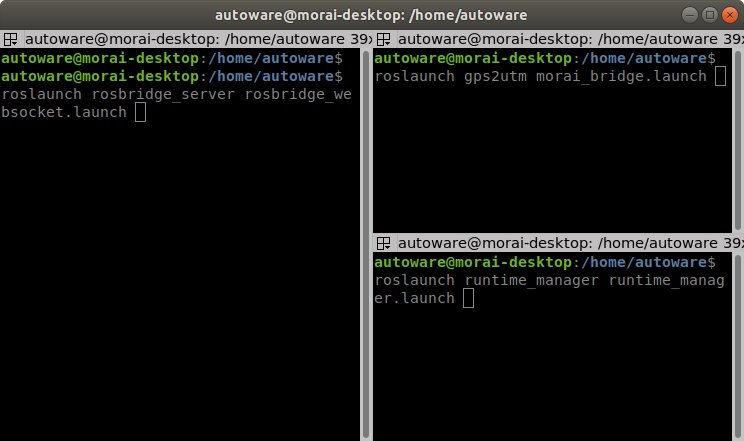
생성된 Terminator 창에서 각 명령어 입력
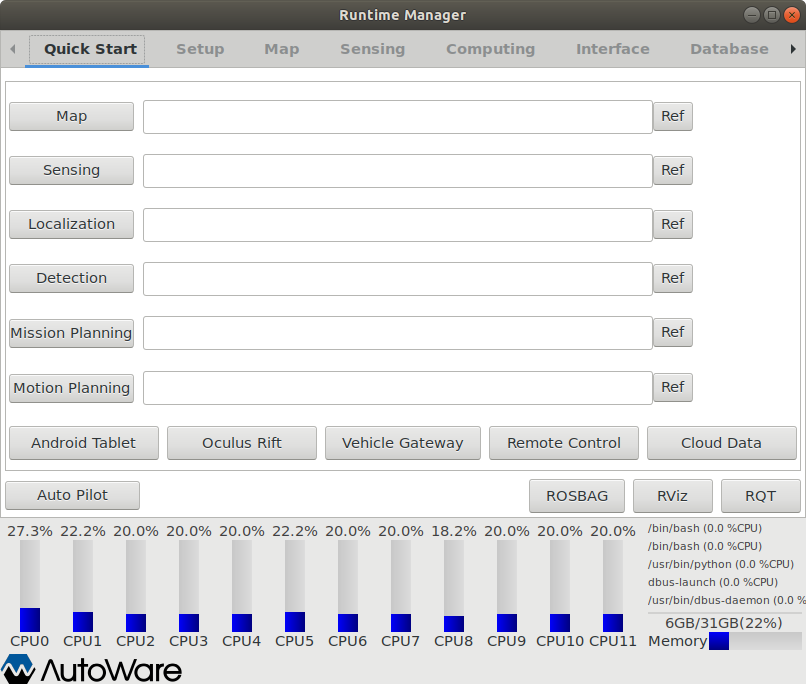
AutoWare 실행 화면
AutoWare 세팅 및 주행 테스트
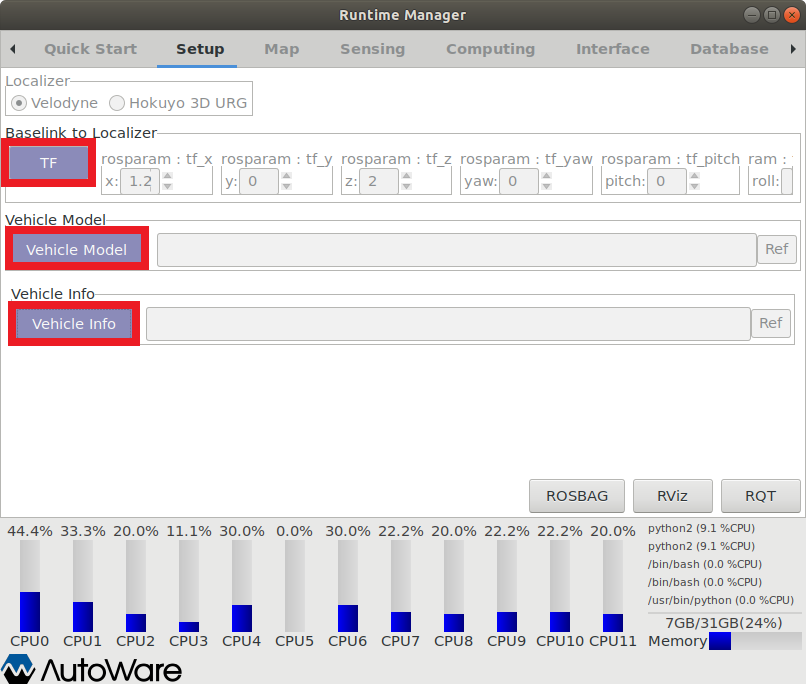
Runtime Manager Setting
Setup
아래 항목들을 클릭해 활성화
TF
Vehicle Model
Vehicle Info
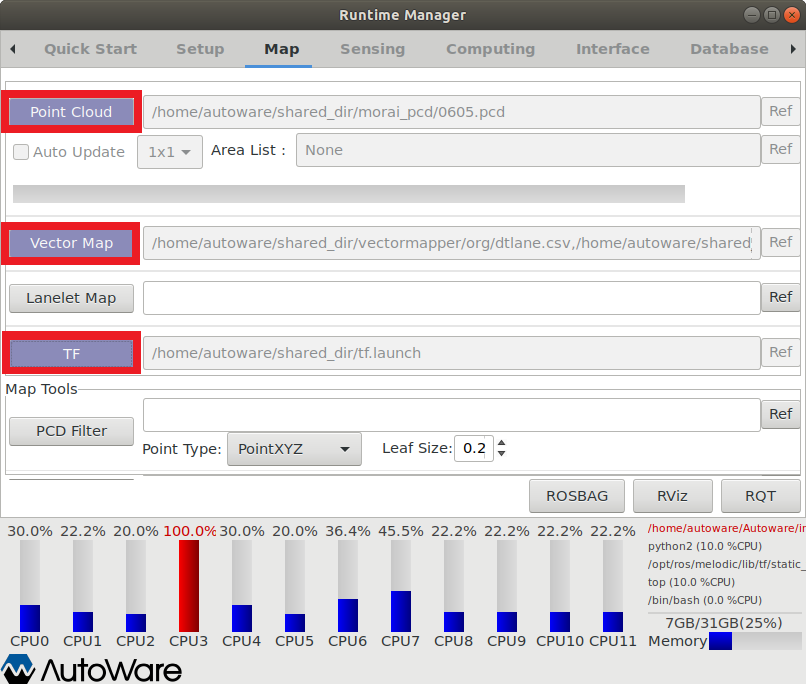
Map
아래의 항목들을 클릭해 활성화
Point Cloud
Vector Map
TF
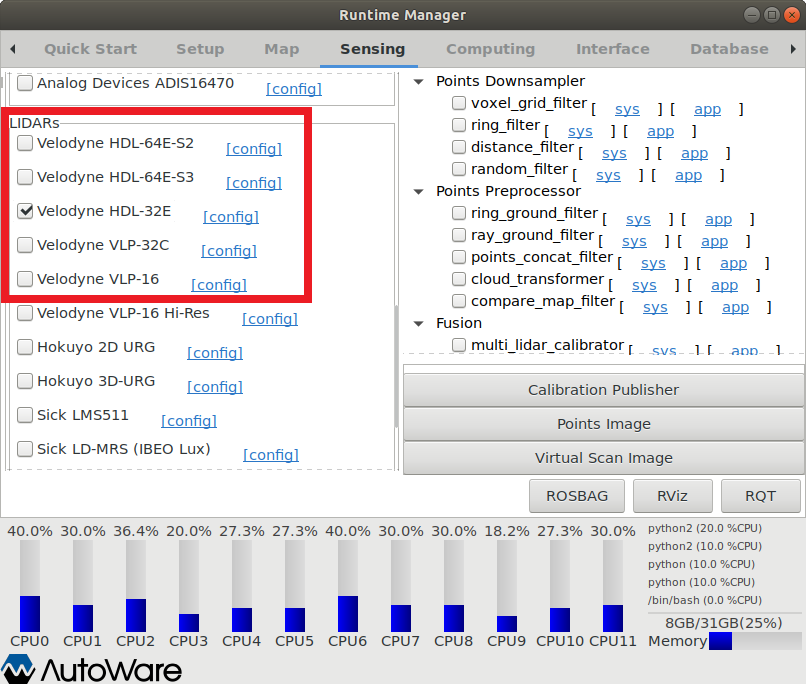
Sensing
시뮬레이터 내 LiDAR 센서 세팅에서 선택했던 LiDAR 모델에 맞게 선택한다.
예: Velodyne HDL-32E
주행 테스트 설정
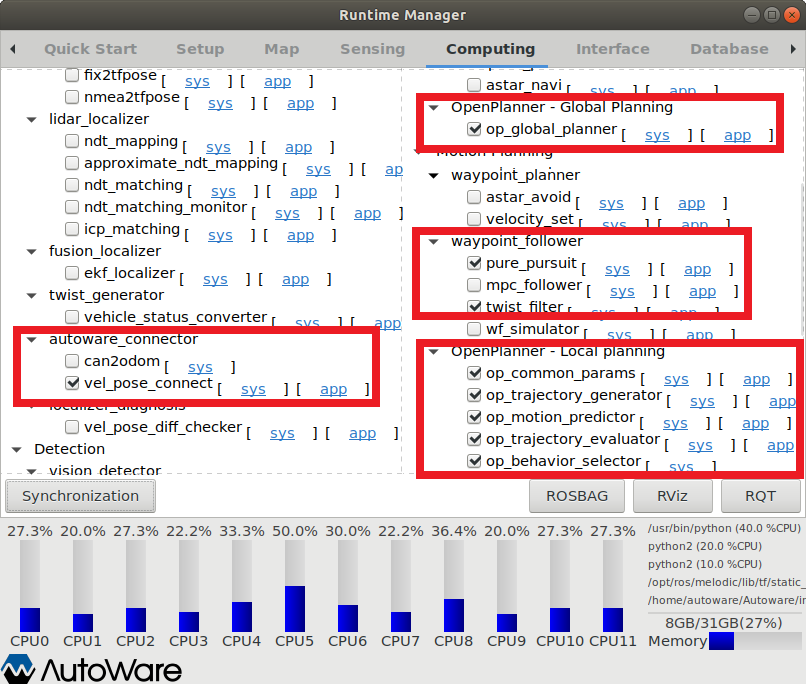
Computing
아래 항목들의 체크박스를 클릭해 활성화
autoware_connector
vel_pose_connect
OpenPlanner - Global Planning (Local path 생성 전 global path 를 먼저 실행 해야 한다.)
op_global_planner
OpenPlanner - Local planning
op_common_params
op_trajectort_generator
op_motion_predictor
op_trajectory_evaluator
op_behavior_selector
waypoint follower
pure_pursuit
Twist_filter
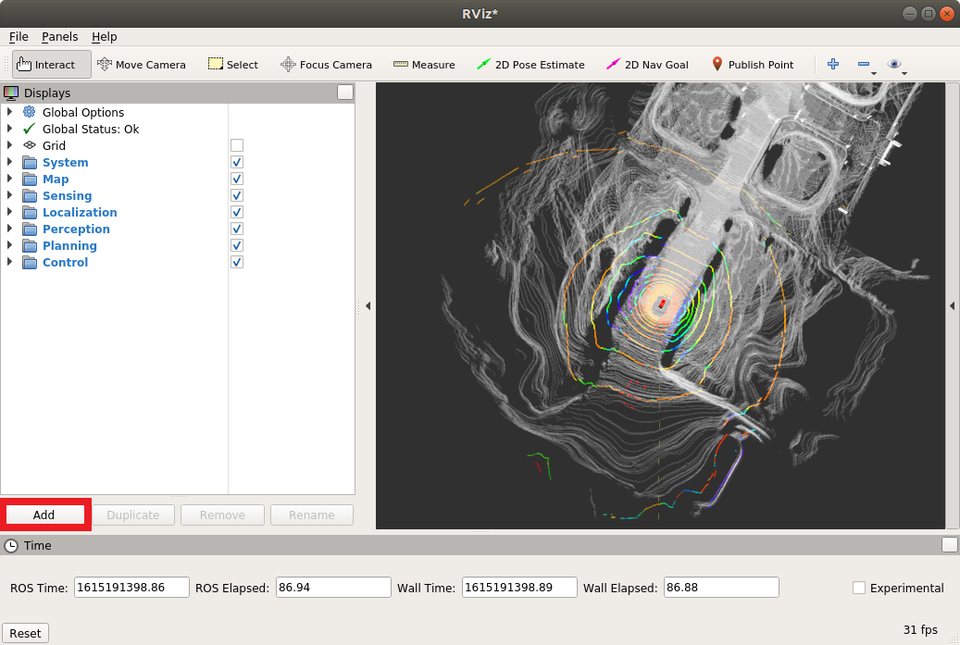
RViz 확인
Runtime Manager 우측 하단에 있는 RViz 버튼을 클릭 한다.
RViz 좌측 하단에 있는 Add > By topic 을 클릭 하여 다음 두 개의 Topic을 추가한다.
/vector_map_center_lines_rviz (global_path 생성)
생성된 global_path 에서 Pose 를 지정하여 시작 지점과 종료 지점을 설정 할 수 있다.2D Pose Estimate (하얀 실선으로 보이는 center line 에서 마우스 클릭으로 시작 지점을 설정)
2D Nav Goal (하얀 실선으로 보이는 center line 에서 마우스 클릭으로 종료 지점을 설정)
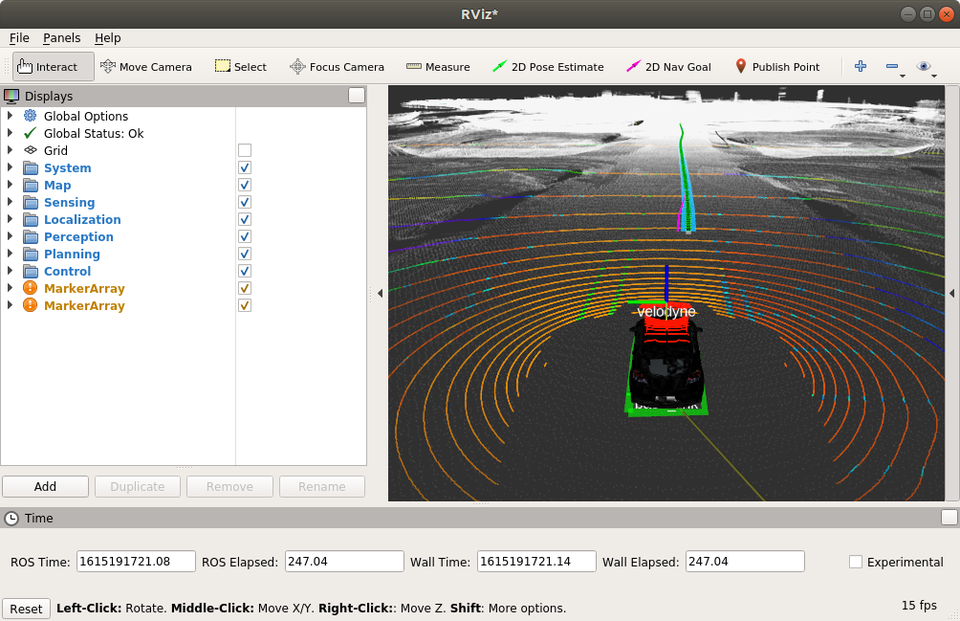
/local_trajectories_eval_rviz (local_path 생성)
시뮬레이터 실행
세팅 후, 시뮬레이터 화면에서 키보드
Q키를 눌러 AV-ExternalCtrl 로 제어 모드를 변경하여 주행 테스트 한다.
24.R2 버전부터 기존 Auto mode 가 아래와 같이 변경되었다.
Auto mode → AV-ExternalCtrl
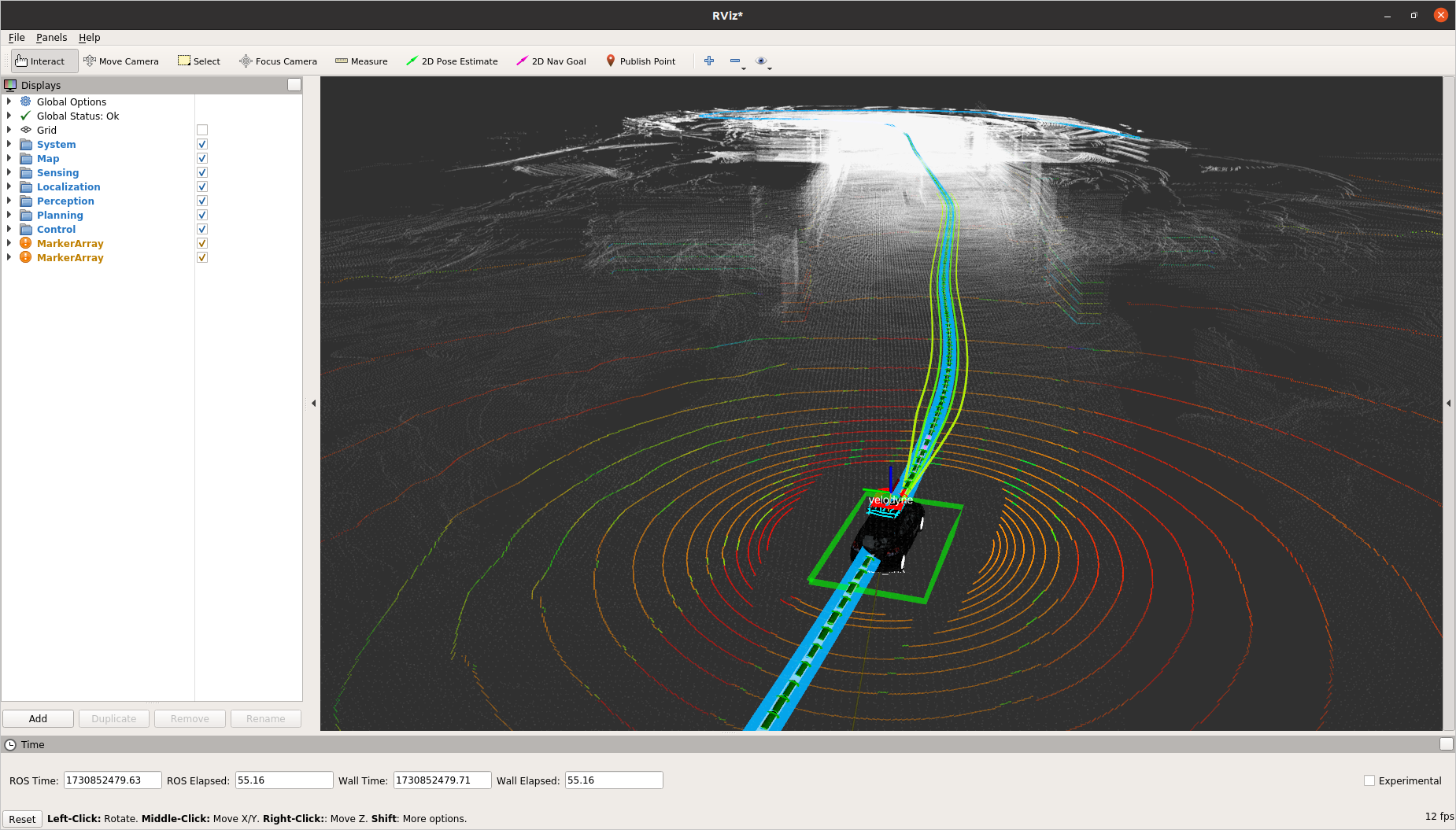
시뮬레이터에서 주행 테스트 시 RViz 화면