멀티 시스템 구성
시뮬레이터와 자율주행 SW가 서로 다른 PC에서 실행하여 서로 통신하는 멀티 시스템을 구성하는 과정에 대하여 설명한다.
특히 ROS 통신은 리눅스와 같은 유닉스 계열 운영체제 시스템에서 동작하므로, ROS 메시지 명령으로 자율 주행 시뮬레이터를 제어하려면 Ubuntu 기반의 단일 시스템 혹은 Ubuntu를 포함하는 멀티 시스템을 반드시 구성해야 한다.
사전 준비 사항
사용의 편의를 위하여, 별도의 리눅스 서버를 구비하는 대신, Windows Host 시스템에 Oracle VM VirtualBox를 이용하여 가상의 리눅스 서버를 구성한다.
Oracle VM 실행 파일: https://www.virtualbox.org/wiki/Downloads (Windows hosts)
ubuntu_edu.vdi 파일: https://www.dropbox.com/s/8uz41xfqkvpcv9m/Ubuntu_edu.vdi?dl=0
Ubuntu 가상 서버 구성
자율주행 SW를 실행하며 시뮬레이터와 통신하는 Ubuntu 가상 서버를 아래와 같은 순서로 구성한다.
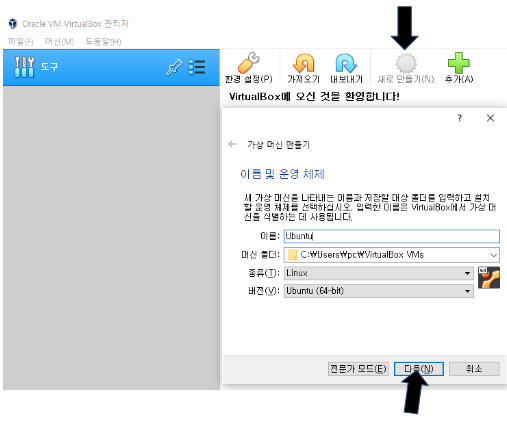
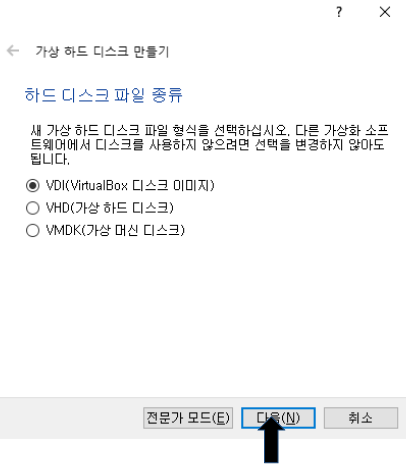
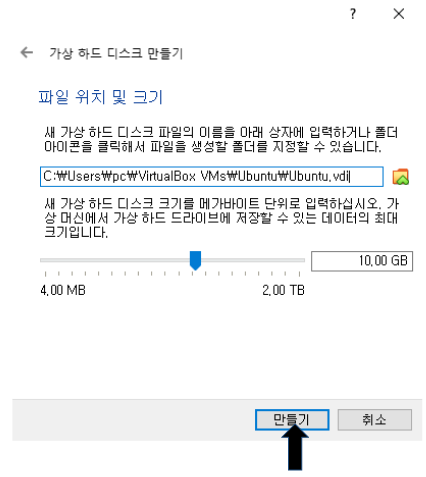
1. 가상 하드 디스크 만들기
윈도우 호스트 운영체제에 Oracle VM을 설치한 후 Ubuntu 서버를 구동하기 위한 가상 하드 디스크를 생성한다.
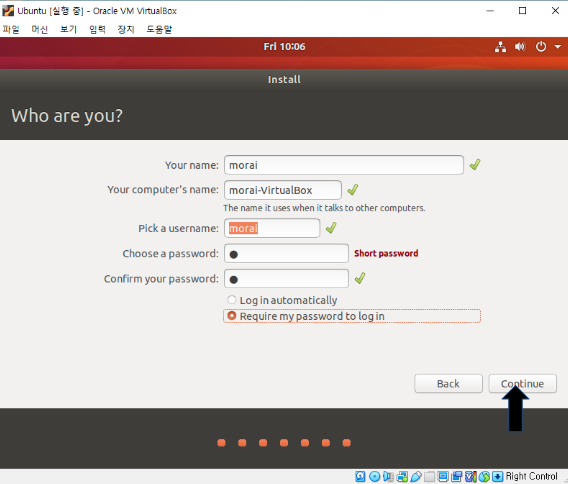
2. Ubuntu 설치
생성한 가상 디스크에 아래와 같은 순서로 Ubuntu 시스템을 설치한다.
아래와 같이 진행 후 파일 추가 대화상자가 뜨면 다운받은 Ubuntu ISO 파일을 선택한다.
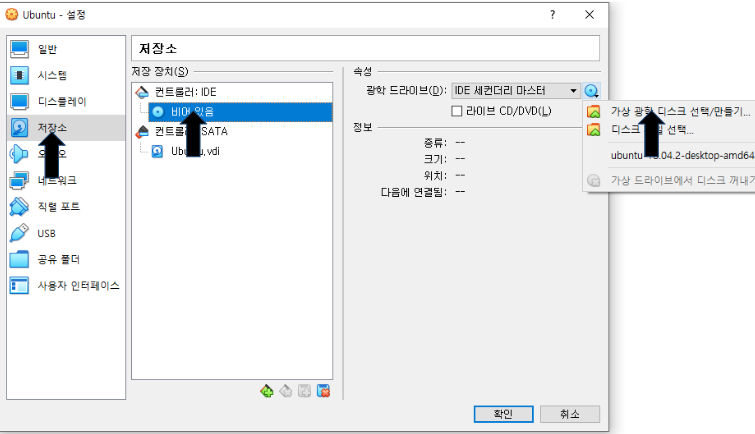
선택한 ISO 파일이 광학 드라이버에 정상적으로 추가되었는지 확인하고 상단 시작 버튼을 클릭한다.
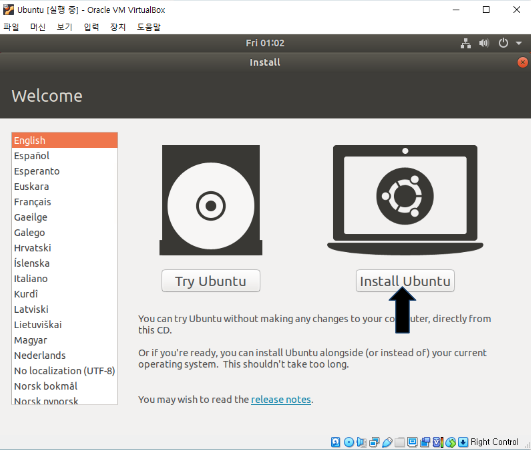
Ubuntu 설치 시작
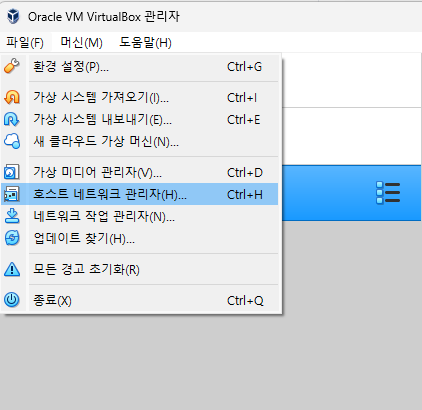
3. 가상 서버 네트워크 설정
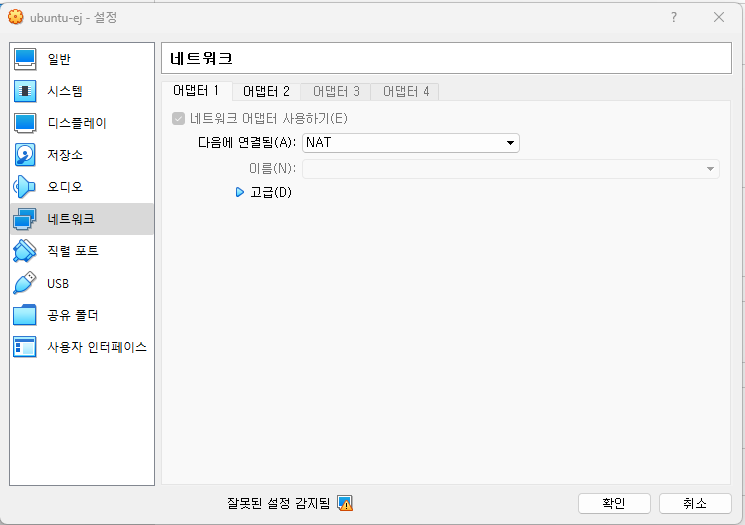
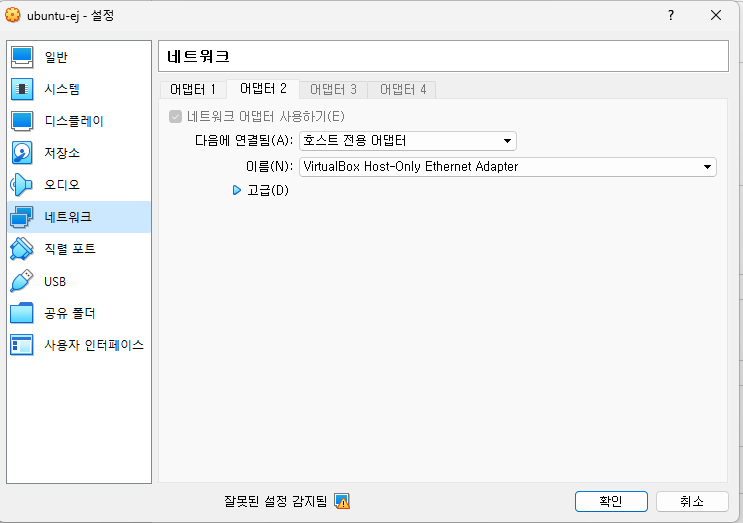
3-1. Ubuntu 서버 실행 전 설치한 VM에 대하여 아래와 같은 순서로 네트워크를 설정한다.
3-2. Ubuntu 네트워크 어댑터 설정

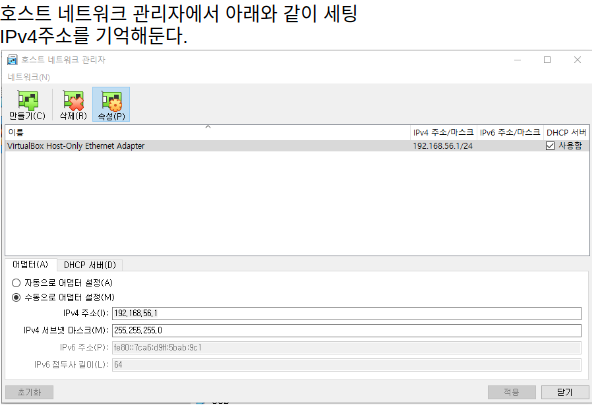
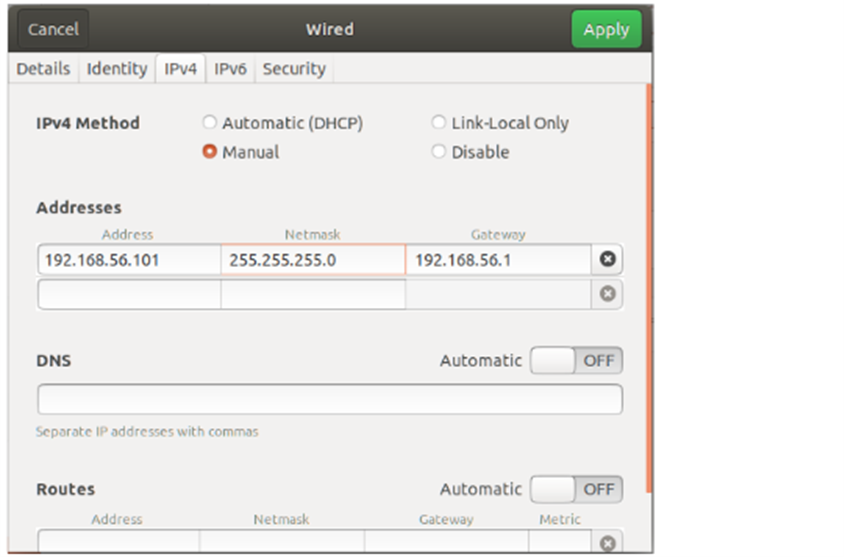
3-3. Ubuntu 서버 실행 후 네트워크 > Ethernet 설정에서 두 번째 IP 주소 변경
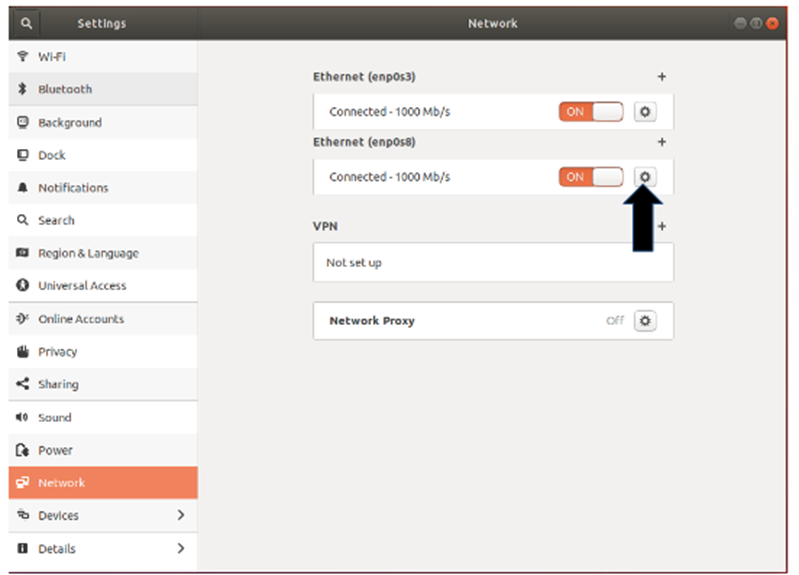
이더넷 IP4 주소를 아래와 같이 설정.
Addresses 192.168.56.101은 가상머신에 임의로 설정된 값으로 그대로 둔다.
GateWay 192.168.56.1은 가상머신의 호스트 네트워크 관리자에 설정한 값이다.
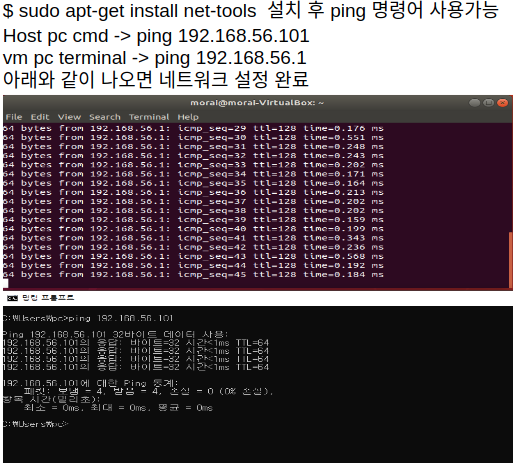
3-4. 윈도우 host의 명령창과 가상 머신의 터미널에서 각 상대 측 IP 주소로 ping 명령으로 통신 연결 테스트