센서 배치 및 설정
이 섹션에서는 MORAI SIM: Drive에서 제공하는 센서(Camera, Lidar, GPS, IMU, Radar)를 배치하고 설정하는 방법에 대해 설명한다.
센서 추가 및 삭제하기
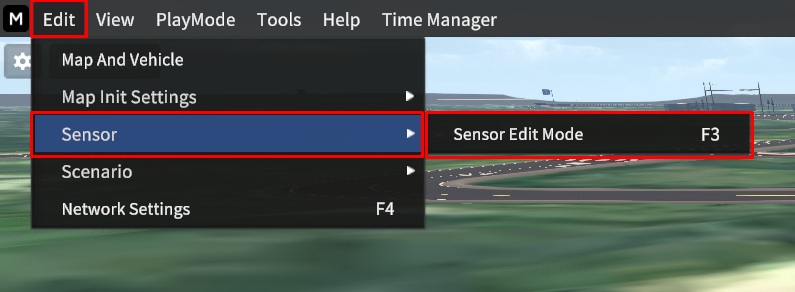
상단 메뉴바에서 Edit > Sensor > Sensor Edit Mode 를 클릭하면 센서 배치 및 설정을 위한 센서 속성창이 열린다.
센서 속성창에서 센서를 선택 후, 배치하려는 차량 위치에 키보드 Shift + 마우스 좌 클릭을 한다.
배치한 센서는 속성창 하단의 Active List 에서 확인할 수 있다.

배치한 센서를 삭제하려면 Active List 에서 센서 별 휴지통을 클릭한다. 또는 배치할 차량 위치에서 키보드 Alt + 마우스 좌 클릭을 한다.
센서 설정 UI
Active List에서 배치한 센서 별 ⚙️ 아이콘을 클릭하면 해당 센서에 대한 Sensor Settings 로 바로 이동할 수 있다.
또는 Sensor Settings 창 좌측 아이콘 패널에서 센서명과 매치되는 아이콘을 클릭하면 해당 센서의 Sensor Settings 창으로 이동할 수 있다.
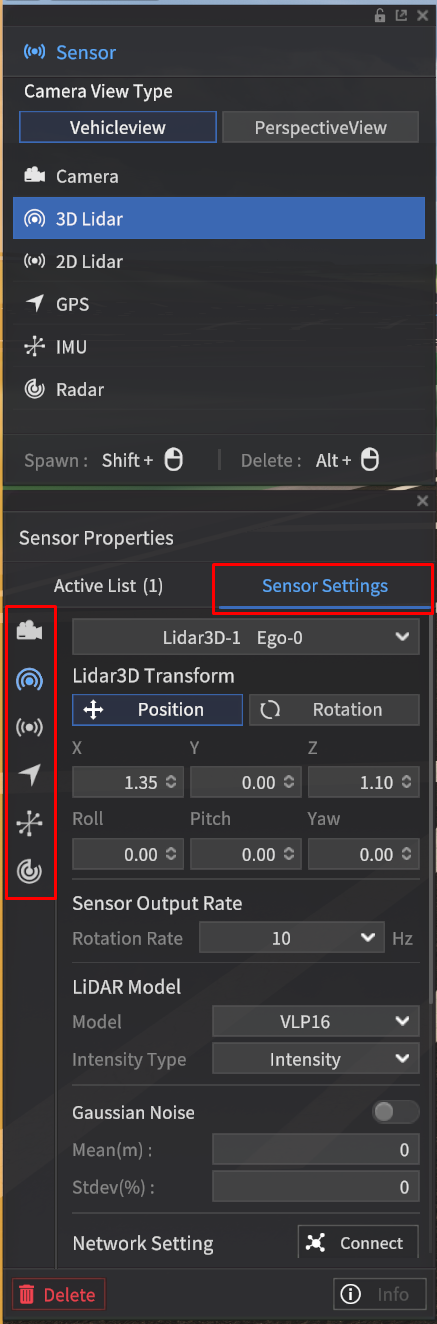
Sensor Settings 에서는 센서의 장착 위치, 장착 각도, 그리고 센서 종류에 따른 특정 파라미터를 확인하고 수정할 수 있다.
센서 별 특정 파라미터는 하기 별도 섹션에서 설명한다.

설정한 센서에서 인지한 객체 데이터는 아래와 같은 센서 별 “보기 기능” 으로 시뮬레이터에서 바로 확인할 수 있다.
Camera: View
GPS 및 IMU: Info
LiDAR: vizPath
Radar: Viz Radar Range
센서 네트워크 설정
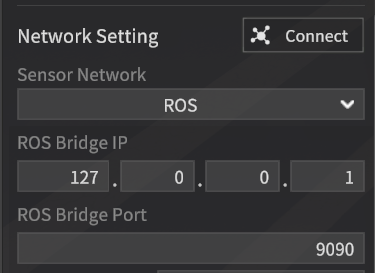
Sensor Settings 하위 Network Setting 에서는 센서에서 검출한 데이터를 ROS, UDP와 같은 통신으로 전송하기 위한 센서용 통신 네트워크를 설정한다.
센서마다 지원 통신 종류가 다르며, 동일한 통신에 대해서는 센서에 상관 없이 설정 방법이 동일하다.
ROS
ROS 통신 대상인 ROS Bridge IP/Port 설정
센서에 상관 없이 각 통신마다 설정 방법은 ROS 통신의 경우, 센서 별 통신 메시지가 다르다.
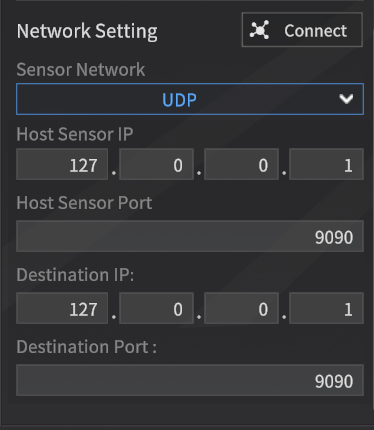
UDP / Apollo
전송 패킷에 대한 Host 및 Destination IP/Port 설정
Viz Bounding Box 2D/ 3D
23.R1.0에서는 카메라 센서에서 검출한 객체의 2D/3D BBox 를 시뮬레이터 상에서 확인할 수 있는 Viz Bounding Box 2D/ 3D 기능이 추가되었다.
아래와 같이 카메라 설정에서는 Viz Bounding Box 2D 및 3D 옵션을 활성화하고 View 기능을 사용하면 2D 및 3D Bounding Box 가 View 화면에 표시된다.
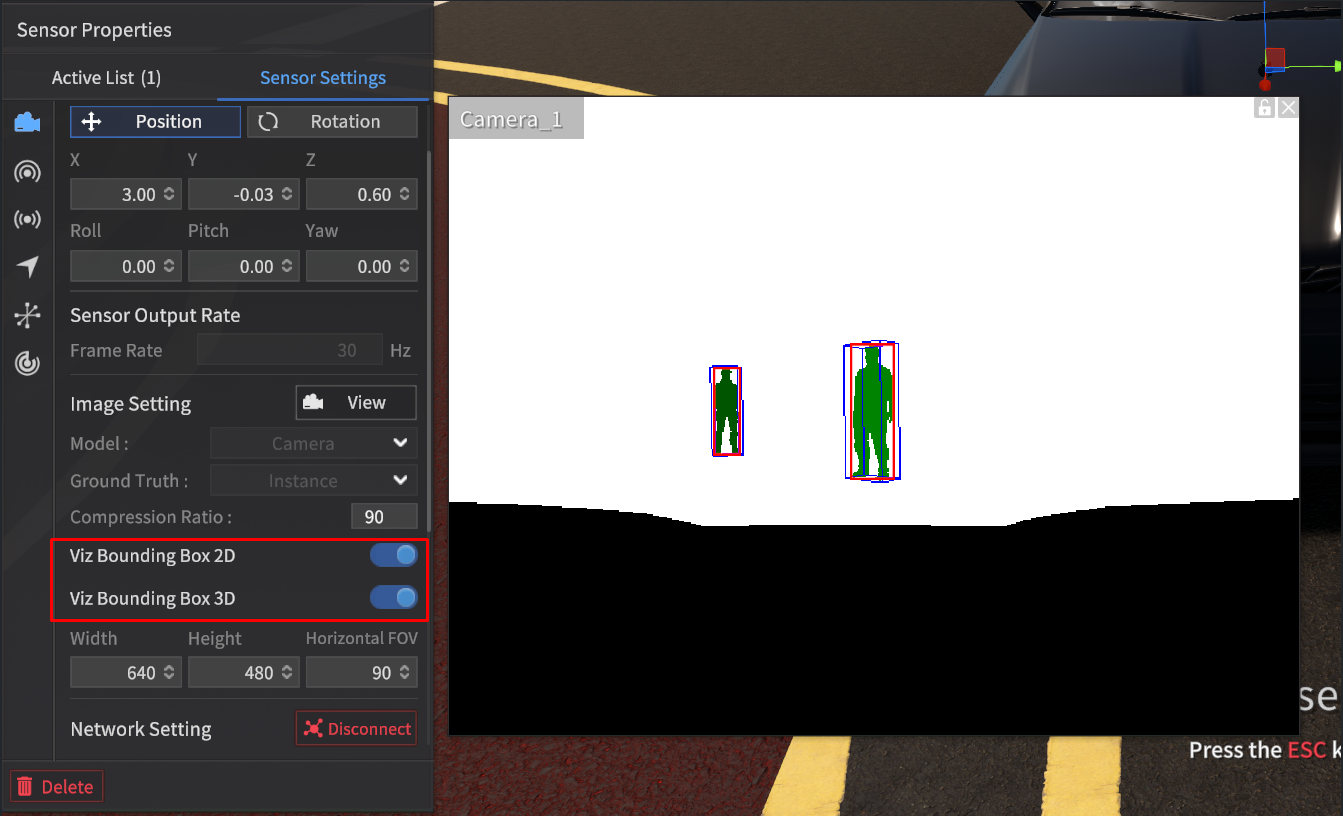
빨간색 박스: 2D Bounding Box
파란색 박스: 3D Bounding Box
Viz Bounding Box 2D 및 3D 옵션은 캡처했을 때 텍스트 파일로 생성되는 2D/3D BBox 검출 기능과 무관하다.
즉, Viz Bounding Box 2D 및 3D 옵션을 비활성화해도 카메라 센서 Instance GT 타입에서 캡처 기능을 사용하면 객체에 대한 2D/3D Bounding Box 텍스트 정보를 생성하여 저장할 수 있다.
Viz Bounding Box 2D 및 3D 활성화 및 GT를 None(RGB)) 설정한 경우, View로 확인했을 때, 2D/3D Bounding Box는 아래와 표시된다.
-1.png?inst-v=fda79c73-1cdd-4bde-94c5-5ef4462a256d)
-2.png?inst-v=fda79c73-1cdd-4bde-94c5-5ef4462a256d)
위 그림과 같이 23.R1.0 부터 신호등 객체에 대한 2D/3D Bounding Box는 표시되지 않는다. 24.R1.0 UPDATE
Viz Bounding Box 2D 및 3D 를 모두 활성화 한 경우, 다른 GT 타입인 Semantic, Instance, Depth 에 대해서도 동일하게 표시된다.
Semantic | Instance | Depth |
|---|---|---|
-3-1_semantic.png?inst-v=fda79c73-1cdd-4bde-94c5-5ef4462a256d)
|
-3-2_instance.png?inst-v=fda79c73-1cdd-4bde-94c5-5ef4462a256d)
|
-3-3_depth.png?inst-v=fda79c73-1cdd-4bde-94c5-5ef4462a256d)
|
센서 설정 저장하기 및 불러오기
Sensor Edit Mode > Active List 에서는 Load 및 Save 를 통해 지원하여 기존의 센서 설정 정보를 불러오거나 현재의 센서 설정값을 파일 (.json)로 저장할 수 있다.

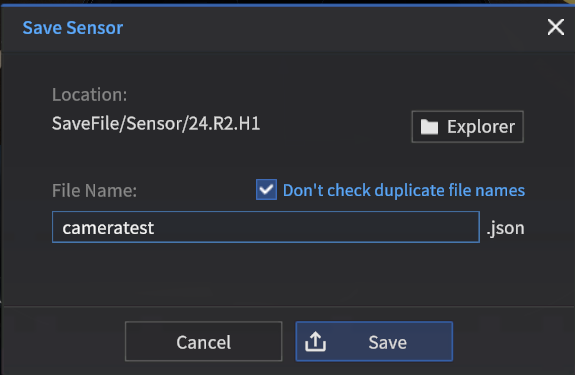
센서 설정 정보 저장하기
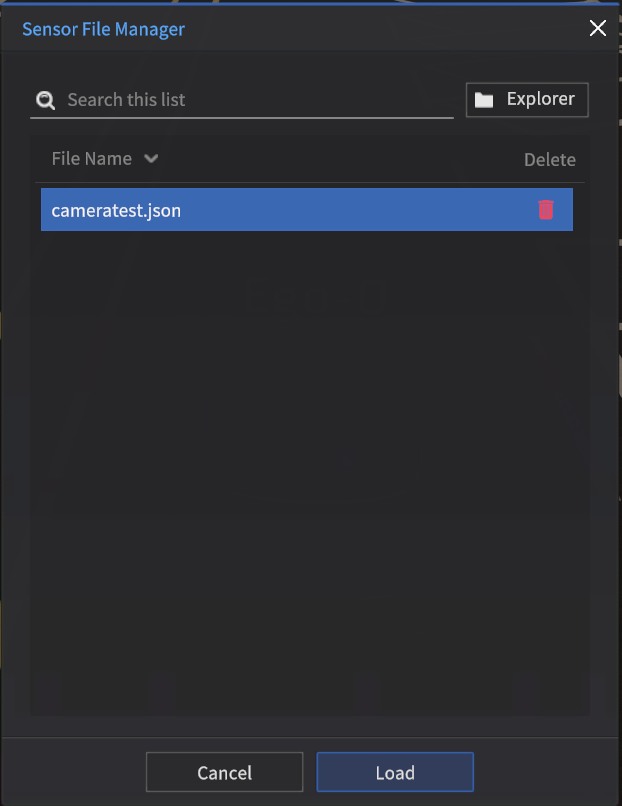
센서 설정 정보 불러오기
Load 시 열리는 Sensor File Manager 에서는 현재 저장된 센서 설정 파일을 보여주며, 해당 파일을 불러오거나 삭제할 수 있다.