사용자 인터페이스
본 섹션에서는 시뮬레이터 실행 후 MORAI SIM: Drive에서 제공하는 UI 구성에 대하여 설명한다.
기본 UI
시뮬레이터를 실행하면 아래와 같이 선택한 맵과 차량을 포함한 시뮬레이터 기본 화면이 나타난다.
시뮬레이터 기본 UI는 Ego 차량을 중심으로 시뮬레이터 기능 및 외부 연동을 제공하는 상단 메뉴와 시뮬레이터 화면 설정을 제공하는 하단 메뉴로 구성된다.

시뮬레이터 기본 UI 화면
상단 메뉴
Edit: 차량, 맵, 센서, 시나리오, 네트워크, 동역학 제어와 같이 차량 주행 테스트와 관련한 모든 설정 기능 메뉴
View: 현재 주행 차량에서 사용 중인 센서, 네트워크, 장애물에 대한 리스트와 MGeo Viewer와 같은 시뮬레이터에 적용된 정밀 지도 포맷 보기 메뉴
PlayMode: Replay, Ghost와 같은 주행 테스트 시 사용할 수 있는 고급 기능 메뉴
Tools: V2X, OccupancyGrid와 같은 차량과 주변 객체 간의 통신 기능 메뉴
Help: 차량 제어 (키보드 모드) 및 시뮬레이터의 주요 기능에 대한 단축키 및 시스템 정보 메뉴
하단 메뉴
Viewport Setting: 차량 클러스터 및 성능, 맵 정보 보여주기 설정 (참고: 유용한 팁 모음 | Viewport-Setting )

Camera: 시뮬레이터 주행 화면을 바라보는 카메라 관점 및 카메라 성능 설정 (참고: 유용한 팁 모음 | Camera-Look-At-Controller )

Time: 시뮬레이터 주행 기준 시간

Weather: 시뮬레이터 주행 기준 날씨
Time과 Weather 설정으로 시뮬레이터 주행 환경을 사용자 조건에 맞게 변경할 수 있다. (예: 비오고 어두운 환경)
주행 환경 설정과 관련하여 유용한 팁 모음 | Environments를 참고한다.
Vehicle Info UI
화면에서 Ego차량을 Ctrl + 마우스 좌 클릭하면 Vehicle Info UI가 열린다.
Ego-vehicle의 속력, 가속도, 제어 출력 값 등 차량의 상태를 나타내는 창이 Vehicle Info 창이다.

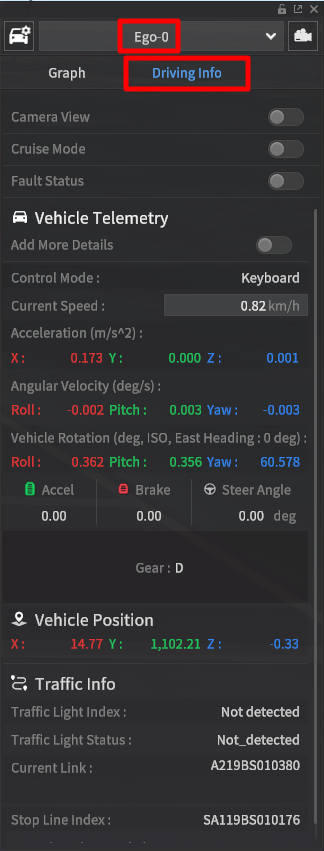
Driving Info(Ego)
Vehicle Info는 Graph와 Driving Info 메뉴로 구성된다.
Driving Info에서는 아래와 같이 Ego 차량의 제어 모드 및 세부 주행 정보를 표시한다.
Camera View
토글을 활성화 하면 선택된 차량을 후방에서 비추는 UI를 생성한다.
Vehicle Position
차량의 현재 위치 정보(X, Y, Z)를 나타낸다.
Vehicle Telemetry
Driving Info에서 Ego 차량의 주행 상태를 보여주는 Vehicle Telemetry 구성은 아래와 같다.
Control Mode: 해당 차량을 제어하는 방법을 표현한다. Auto/ Keyboard /Game Wheel 모드가 있다.
Current Speed: 차량의 속력를 나타내며 단위는 kph다.
TIP 사용자가 직접 숫자를 입력하고 Enter 키를 인가하면 순간적으로 해당 속력으로 이동시킬 수 있다.Acceleration: 차량의 가속도를 나타내며 단위는 m/s2이다.
Angular Speed: 차량의 각속도를 나타내며 단위는 deg/s이다.
Vehicle Rotation: Global ENU 좌표계에서 차량의 회전 상태를 나타내며 단위는 deg이다.
Accel: 차량의 accel pedal의 인가량을 나타낸다. (0 ~ 1)
Brake: 차량의 brake pedal의 인가량을 나타낸다. (0 ~ 1)
Wheel Angle (deg): 차량 앞바퀴의 회전 정도를 나타낸다. 차량마다 스펙이 다르다. (-Max Wheel ~ Max Wheel)
Gear: 차량의 기어 상태를 나타낸다. (
P/R/N/D)
Traffic Info
Driving Info에서 Ego 차량의 주변 교통 정보를 보여주는 Traffic Info 구성은 아래와 같다.
Traffic Light Index: 차량의 현재 위치에서 바라봐야 하는 신호등의 인덱스를 나타낸다. 봐야 하는 신호등이 모호하거나 (현 위치에서 선택 가능한 신호등이 여러 개인 경우) 없는 경우 Not detected로 표시된다.
Traffic Light Status: 인식된 신호등의 상태 값을 표시한다. 인식된 신호등이 없는 경우 Not detected로 표시된다.
Current Link: 현재 위치의 Link정보를 표시한다.
Stop Line Index: 현재 위치에서 바라봐야 하는 Stop Line의 정보를 표시한다. 없는 경우 Not detected로 표시한다.
Stop Line Distance: 인식된 신호등과 차량 사이의 거리를 표시한다. 단위는 m이다.
Driving Info (NPC)
Driving Info (Ego) 창과 유사하지만, Ego-vehicle이 아닌 주변 NPC 차량을 선택 시 열리는 창이다. 아래 세부 설명에는 Ego 창과 동일한 기능 또는 상태 정보 관련 정보는 생략하고 추가 되는 기능에 대해서만 설명한다.
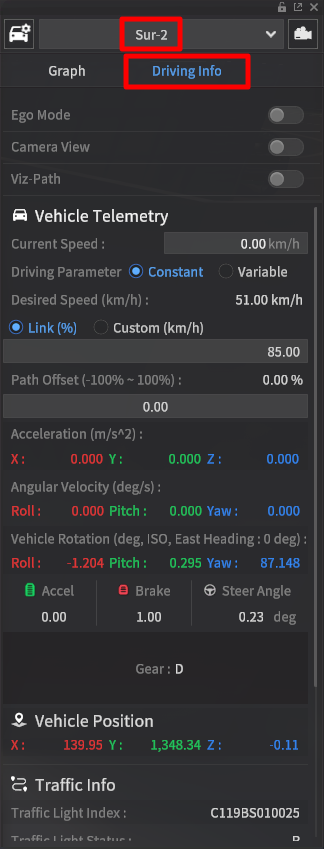
Ego Mode
Sur 차량을 Ego 차량으로 변환 하는 기능.
시뮬레이터에서 Ego 차량을 여러 대 동작할 때 사용함.
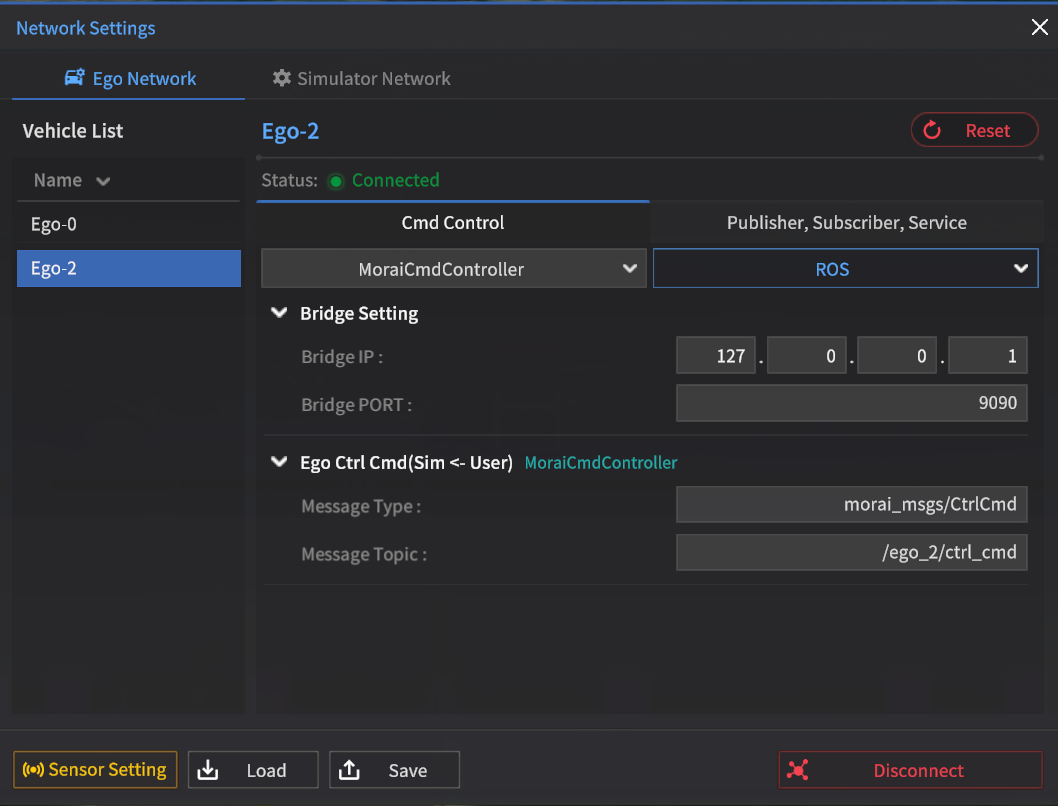
Sur 차량에서 Ego Mode를 활성화하면 아래와 같이 변환된 Ego 차량 (Ego-2)에 대한 네트워크 설정 창이 나타나고, 각 Ego마다 네트워크 연결을 통한 차량 제어를 할 수 있다.
Viz-Path
Sur 차량이 주행 할 경로를 시각화하는 기능. 이 때 Sur 차량은 크루즈 모드로 동작함.
Vehicle Telemetry
Driving Info에서 Sur 차량의 주행 상태를 보여주는 Vehicle Telemetry 구성은 아래와 같다.
Desired Speed Mode: NPC 차량의 목표 속력 모드를 나타낸다.
Link Speed: 각 링크에 부여되어있는 속력의 특정 비율 만큼을 목표 속력으로 가져간다. 단위는 %이다.
Constant Speed: 목표 속력을 고정으로 설정한다. 이때 ACC나 곡률에 의한 감속 등은 내부 알고리즘으로 자동 결정된다.
즉, 해당 차량에 설정할 수 있는 최대 속력를 의미하는 것이며 모든 주행 상태에서의 목표 속력를 의미하는 것은 아니다.
Traffic Info
Driving Info에서 Sur 차량의 주변 교통 정보를 보여주는 Traffic Info 구성은 아래와 같다.
Target Link: 차량이 주행 목표로 하는 링크 인덱스를 표시한다.
Stop Line Index: 현재 위치에서 바라봐야 하는 Stop Line의 정보를 표시한다. 없는 경우 Not detected로 표시한다.
Stop Line Distance: 인식된 신호등과 차량 사이의 거리를 표시한다. 단위는 m이다.
Collision Distance: 앞에 충돌 가능성이 있는 물체 (차량, 장애물 등)에 대한 거리를 표시한다. 단위는 m이며 검색되지 않으면 999로 표현한다.