Release Date | 2024/04/19 17:00 PM (GMT +9) |
Simulator | MORAI SIM: Drive |
Version | 24.R1.0 |
SIM: Drive 24.R1.0에 반영된 변경 사항은 아래와 같습니다.
추가 및 개선 사항
구분 | 추가 및 개선 사항 |
|---|
Map | |
Scenario | |
Dynamics | 대상 차량 2012_Hyundai_HD65 2013_Hyundai_Xcient(P520) 2013_Hyundai_Xcient(P540) 2014_Hyundai_Xcient(Mixer) 2016_Hyundai_Universe (색상별 차량 포함) Default_Bus Default_Truck
|
Vehicle | 차량 목록 2017_Hyundai_Grandeur 2020_Hyundai_sonata 2020_Kia_K5 2014_Kia_K7 2016_Hyundai_Sonata 2015_Kia_K5 2023_Kia_ev6 2017_hyundai_solati_h350 2013_Hyundai_Porter2 2012_Hyundai_HD65 2013_Hyundai_Xcient(P520) 2013_Hyundai_Xcient(P540) 2014_Hyundai_Xcient(Mixer) 2015_Toyota_Prius(HEV) 2019_Hyundai_Kona(EV) 2016_Kia_Soul(EV) 2020_Kia_Soul(EV) 2019_kia_sedona 2020_chlyser_pacifica_hybrid
|
Sensor | LiDAR 3D Bounding Box - 8 corner point format지원 CAMERA Bounding Box 의 연산 오류 수정 및 정확도 향상 2개 이상의 Object가 묶여 있는 에셋의 경우, gRPC를 통한 Object 생성 시 Bounding Box 병합 여부 설정 가능
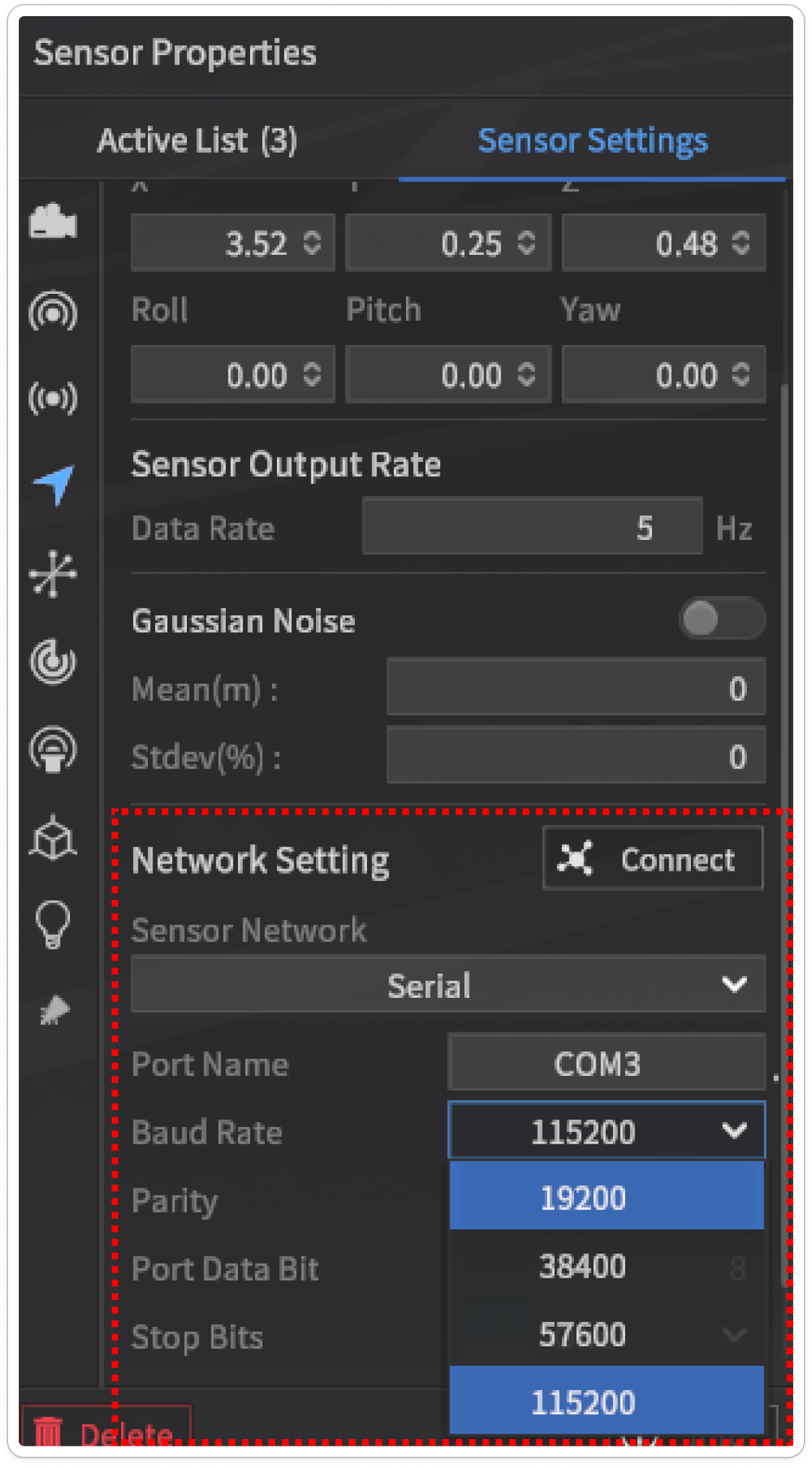
3D LiDAR 센서 모델 HDL32e (기존 HDL32 모델의 개선 버전) 출시 (Add-on) Custom Dataset (Semantic color customization) 기능 삭제 (Add-on) GPS sensor Rate 기본 값과 범위 기준 변경
자세히 Ego 차량 외에 Surround, Pedestrian, Obstacle, Ground 에 센서 부착 가능 기능 활성화 시 Semantic/Instance Camera에서 Ego Vehicle과 Surround Vehicle을 구분하지 않음
|
Network | |
ETC. | 자세히 기존) PADDLE SHIFTERS → 변경) L2, R2 : 방향 지시등 OPTIONS : 비상등 PS : 제어 모드 변경 cruise mode 또는 auto mode 인 경우 game wheel mode로 변경 game wheel mode 인 경우 keyboard mode 로 변경 keyboard 인 경우 동작하지 않음 (Q버튼으로 모드 변경)
Thrustmaster의 MODE + L3 + R3 버튼을 5초 이상 누르면 페달의 Accel, Clutch 순서가 변경
|
CAMERA | 자세히 Sedan (5종): 2016_Hyundai_Genesis_DH, 2016_Hyundai_Ioniq, 2019_hyundai_genesis_g90, 2020_Kia_Stinger, 2021_Hyundai_G80 SUV (9종): 2016_Hyundai_Santafe, 2017_Kia_Niro(HEV), 2017_Kia_Sorento, 2019_Hyundai_Nexo, 2020_volvo_xc90, 2021_Hyundai_GV70, 2021_Hyundai_Genesis_GV80, 2021_Volkwagen_Golf_GTI, 2023_Hyundai_Ioniq5 Bus (1종): 2016_Hyundai_Universe MPV (1종): 2021_Kia_Carnival
|
오류 수정 사항
구분 | 오류 수정 사항 | 비고 |
|---|
Dynamics | | |
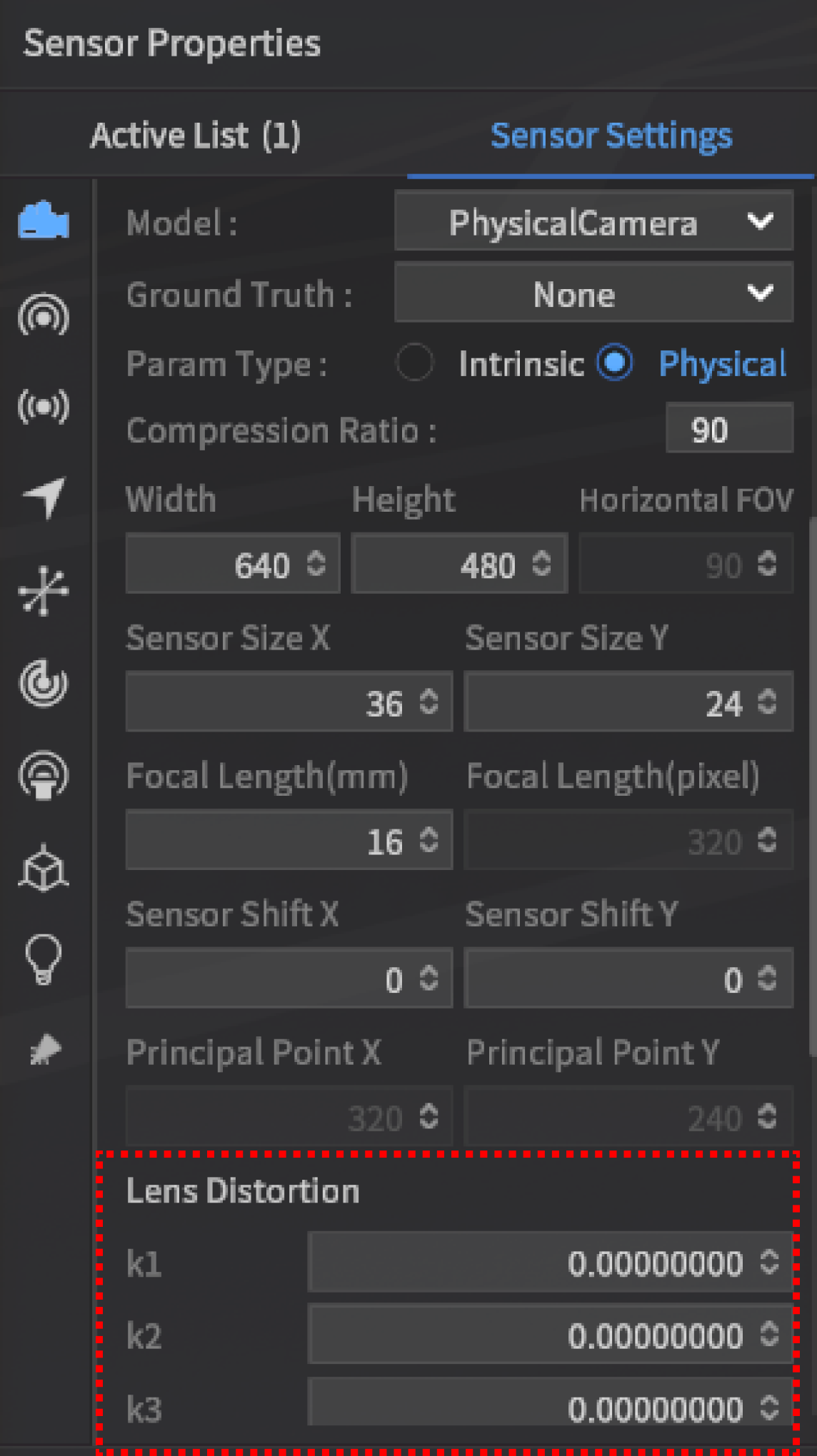
Sensor | 맵의 일부 Object가 Sensor를 통해 감지되지 않는 현상 개선 일부 맵의 차선이 잘못된 Semantic Color label(Tag)를 지니고 있는 현상 개선 Semantic Image에서 일부 물체의 색이 정상적으로 표출되지 않는 이슈 수정 일부 Obstacle의 LiDAR 계측 값이 Bounding box에서 벗어나 있는 현상 개선 Camera Sensor에서 일부 설정에 대해 Data Capture시 Save File 생성에 실패하는 현상 개선 일부 보행자 및 물체의 3D bounding box가 생성되지 않거나 크기에 맞지 않게 생성되는 현상 개선 HDL32e 및 일부 3D LiDAR Model의 측정 값이 Veloview에서 노출 되지 않는 현상 개선 동일 Sensor 여러 개 설치 후 ROS Network 연결 시 Topic 명이 중복되는 현상 개선 일부 모델의 Tagging Name이 규칙에 맞게 설정되지 않는 오류 수정 PhysicalCamera 의 GT Type을 Depth로 설정 시, ROS를 통해 Data 수신이 불가한 현상 개선 3D LiDAR Sensor 측정 값이 데이터 시트와 일부 다르게 출력되는 현상 개선
| |
Scenario | NPC Ghost Mode에서 차량 및 보행자 생성 오류 수정 및 생성 객체 최대 수 증가 Built-in Scenario Save 후 Load 했을 때 보행자가 삭제되는 현상 개선 보행자의의 WayPoint를 삭제 하여도 실시간으로 반영이 되지 않는 오류 수정 Scenario 로드 시 일부 Sur 차량이 Load 되지 않는 현상 개선 Scenario 저장 후 창을 닫으면 일부 물체가 위로 튕겼다가 떨어지는 현상 개선 Multi-Ego가 포함 된 Scenario Load시 Multi-Ego의 Network 연결 할 수 없는 현상 개선 일부 모델이 겹쳐서 배치가 가능한 현상 개선 일부 보행자 및 이륜차 모델을 배치할 수 없던 현상 개선
| |
Map | | |
Network | 3D Lidar Sensor ROS Network Setting에서 Message와 FrameID 값이 비어있는 현상 개선 ROS를 통해 Multi-Ego의 SensorPosControl, SetTrafficLight를 동작 할 수 없는 현상 개선 Ego vehicle status의 angular velocity 값이 정상적으로 출력되지 않는 오류 수정 Virtual Sensor의 Apollo 연결 안정성 개선 사용자 계정에 특정 옵션이 추가 되어 있어도 해당 옵션 Bundle이 Download 되지 않는 현상 개선
| |
Vehicle | 신호 대기 중 차량에 Accel과 Brake에 Chattering 발생하는 현상 개선 일부 구간에서 Surround Vehicle이 차선 변경 시 Steer를 과하게 틀어 차선을 벗어나는 현상 개선 차량의 브레이크등과 방향 지시등이 적절한 시점에 점등되지 않는 현상 개선 이륜차 모델 운전자의 자세가 부자연스럽게 표시되던 현상
| |
UI | | |
ETC | Game Wheel 컨트롤러(Thrustmaster T300RS GT)를 사용할 때 페달 Mapping 순서가 잘못되어 있는 오류 수정 Sensor Edit Mode 내 Sensor Settings 탭에서 Delete 버튼의 Tool Tip 표기 오류 수정 특정 센서 배치 시 다른 센서의 모델링이 표시되는 현상 개선 Object 설치 후 시간이 지나고 물체가 움직이거나 선택이 안되는 오류 수정
| |